一.简介
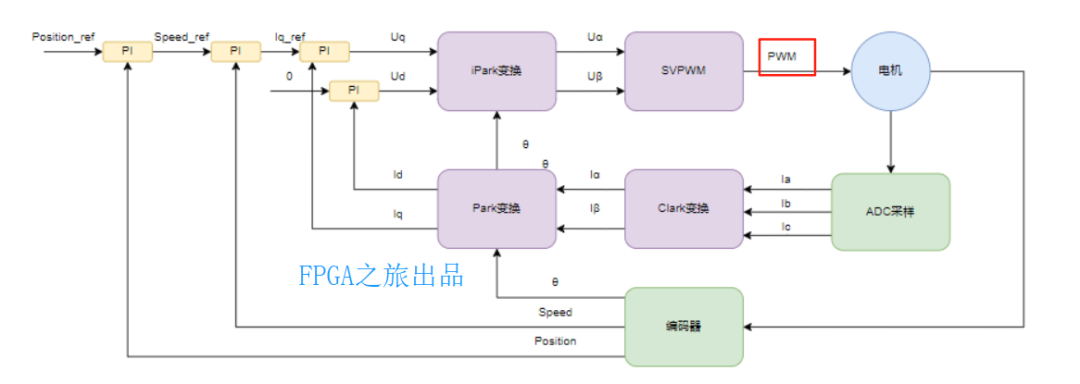
哈喽,大家好,从今天开始正式带领大家从零到一,在FPGA平台上实现FOC算法,整个算法的框架如下图所示,如果大家对算法的原理不是特别清楚的话,可以先去百度上学习一下,本教程着重介绍实现过程,弱化原理的介绍。那么本文将从PWM模块开始进入FOC算法中去。
二. PWM模块设计
我们知道有些驱动芯片是需要输入互补的PWM,例如FD6288,而有些驱动芯片则只需要输入PWM,芯片内部会自动将其转为互补的PWM进行工作,例如DRV8313和MP6540。单路FOC开发板使用的是MP6540,多路电机驱动板使用的是FD6288,因此设计的PWM模块需要兼容这两种模式。
1. 模块端口信号
模块端口信号如下所示,命名和工作模式借鉴了STM32定时器的工作方式。
moduletimer_top #( parameter DEFAULT_ARR =16'd1500 , //5000 parameter DEFAULT_CCR = 16'd750 , //2500 parameter COUNT_MODE ="UP" , //UP DOWN CENTRE parameter TRIG_ENABLE ="ENABLE" , //ENABLE DISABLE parameter PWM_OUT ="NONE" , //NONEP PN parameter PWM_OUT_MODE ="MODE1" , //MODE1 MODE2 parameter PWM_DEATH_TIME =3'd0 // 0 ~ 10 sys_clk )( input sys_clk_i , input sys_rst_n_i , input pwm_clk_200M_i , input timer_wr_type_i , input timer_write_en_i , input[15:0] timer_write_data_i , input timer_read_en_i , output[15:0] timer_read_data_o , output timer_trig_o , output timer_pwm_o , output reg timer_pwm_n_o );
首先给大家介绍一下端口参数
DEFAULT_ARR: 默认的定时器计数周期。
DEFAULT_CCR: 默认的定时器比较输出值。
COUNT_MODE: 定时器工作模式,分为向上计数、向下计数和中心计数三种模式,这是和STM32的三种模式保持一致。
TRIG_ENABLE:中断输出是否使能,当计数器计数到CCR寄存器值的时候,是否输出一个中断信号。
PWM_OUT: PWM输出,分为三种模式,其一是不输出,其二是只输出一路PWM,其三是输出互补两路PWM。
PWM_OUT_MODEL: PWM输出的模式,也就是但计数器小于CCR的时候,是输出高电平,还是输出低电平。
PWM_DEATH_TIME: 死区时间,最大为10个时钟周期,也就是50ns,加上芯片内部基本上都内置了死区补偿,这个时间是够用了的。
然后就是端口信号
sys_clk_i,sys_rst_n_i: 100Mhz系统时钟和系统复位
pwm_clk_200M_i: PWM输出的参考时钟,为200Mhz,这个时钟频率越高,PWM的分辨率也就越高。
timer_trig_o: 中断信号输出
timer_pwm_o,timer_pwm_n_o: PWM信号输出
其他:动态调整定时器的计数周期ARR和比较值CCR,从而可以调整PWM的频率和占空比,实际使用的过程中,只会调整占空比。
2. 设计细节
PWM模块设计原理比较简单,其中有两点需要注意一下,这两点中好了 ,设计起来就毫无压力~。
1. 跨时钟同步: 定时器时钟频率为200Mhz,而系统时钟频率为100Mhz,模块只会涉及到中断信号的同步,定时器时钟域同步到系统时钟域下,快时钟域同步到慢时钟域下,也是同步场景中最为常见的一种,这里直接将脉冲信号作为使能信号,对另外一个信号进行取反,然后检查其边沿即可实现同步。
always@( posedge pwm_clk_200M_i or negedge sys_rst_n_i )begin
if( sys_rst_n_i ==1'b0 )
timer_trig_pluse
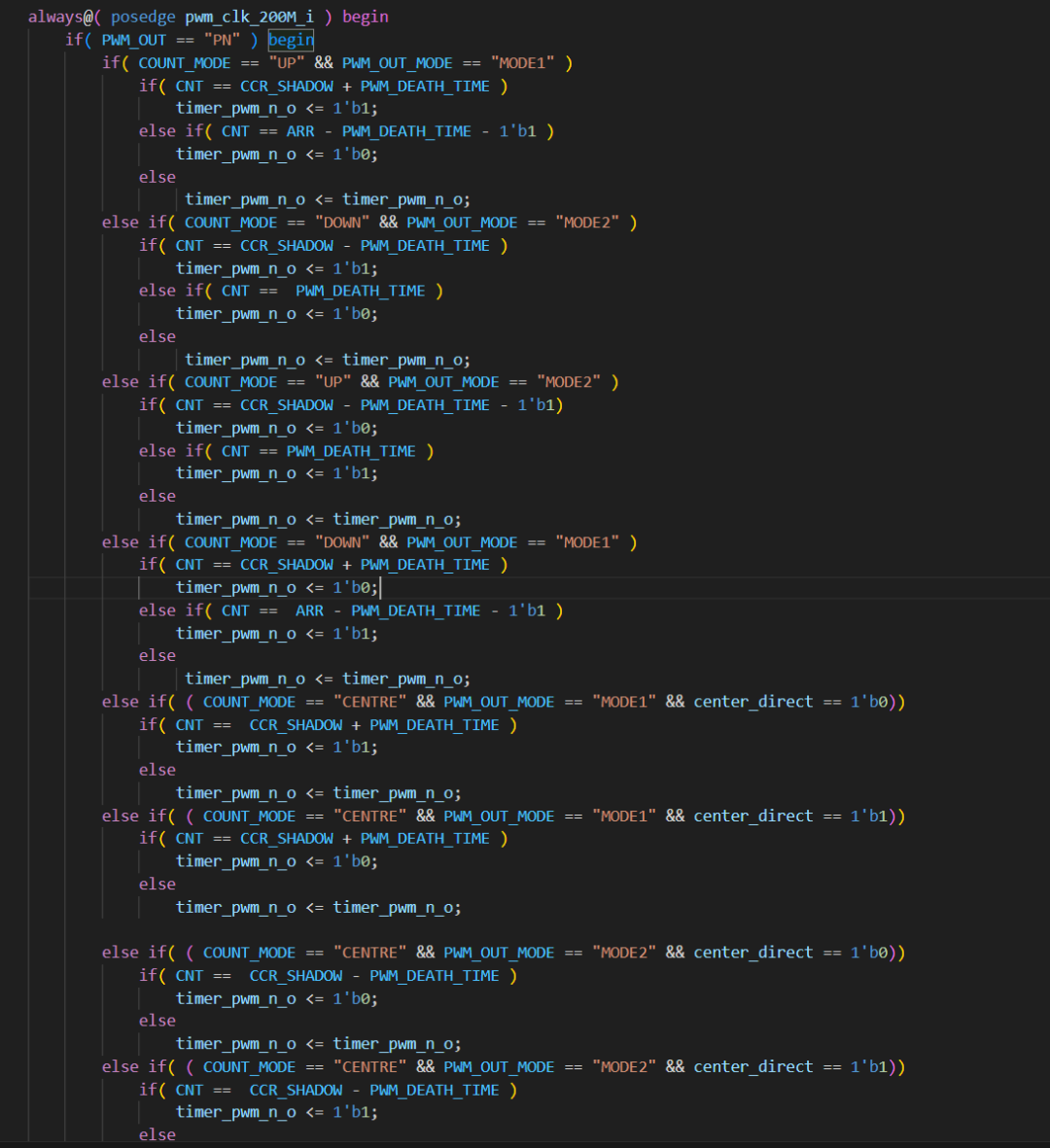
1.互补PWM输出死区控制:死区控制的目的是为了防止短时间内两路PWM输出同时为高的情况发生,从而导致上下臂同时导通,了解了这个之后,就只需要将互补PWM输出信号中,输出为高电平的那个信号提前拉低即可,在实现的过程中要结合配置的定时器模式进行输出,会涉及到多重判断的情况,如下图所示,大家可以通过多级判断,去优化这部分时序。
最后给大家展示一下仿真结果

来源:本文转载自FPGA之旅公众号
原文标题:FPGA从零到一实现FOC(一)之PWM模块设计
文章出处:【微信号:FPGA研究院,微信公众号:FPGA研究院】欢迎添加关注!文章转载请注明出处。






评论区
登录后即可参与讨论
立即登录