FPGA DE23-Lite串口通信详解:UART模块设计与仿真
1开发板串口简介
DE23-Lite开发板提供了一个UART通信接口(物理接口是下图的Type C接口),用户能够通过主机与Agilex 3 FPGA进行串口通信。
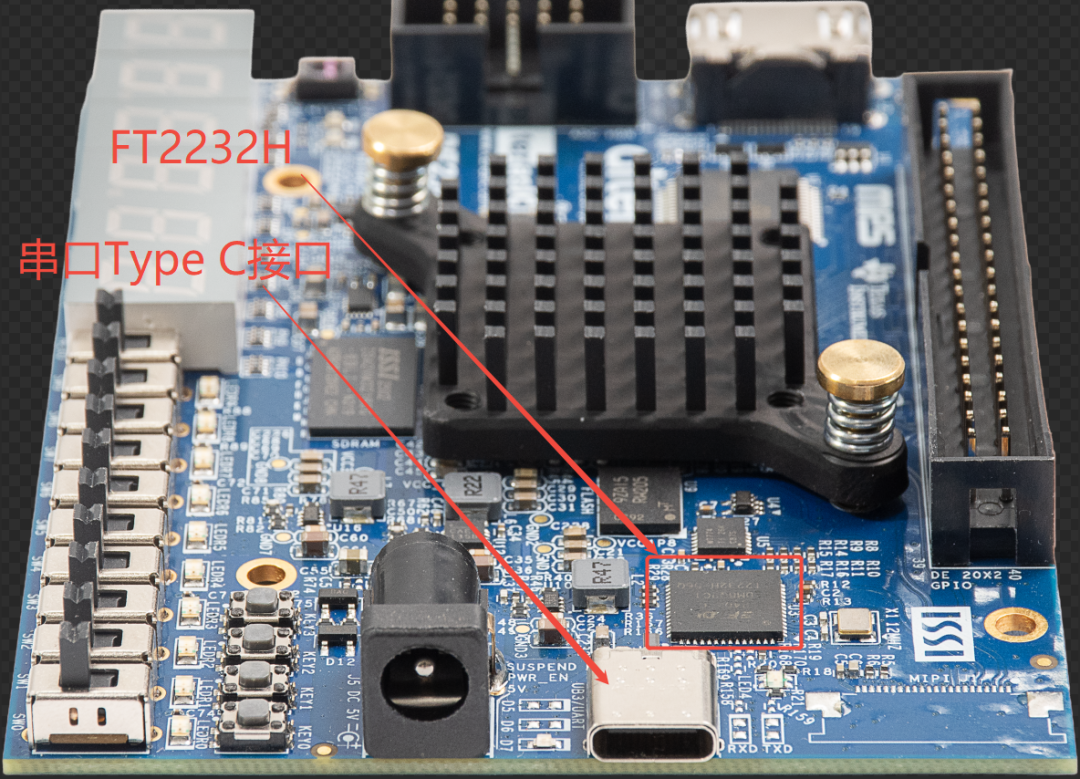
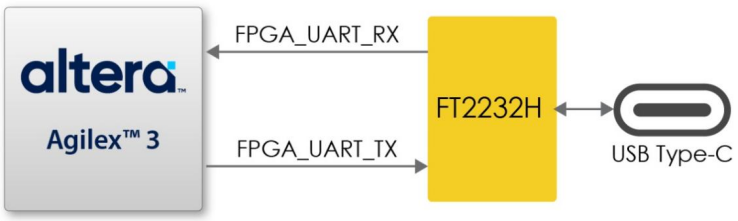
该接口使用DE23-Lite板载的USB Blaster III电路中的FT2232H芯片作为UART转USB的桥梁。将USB线连接到DE23-Lite板的Type-C接口和主机之间,即可启用USB Blaster III和FPGA UART功能,此时无需串行驱动程序,但用户在使用UART功能前需要确保已安装USB Blaster III驱动程序。
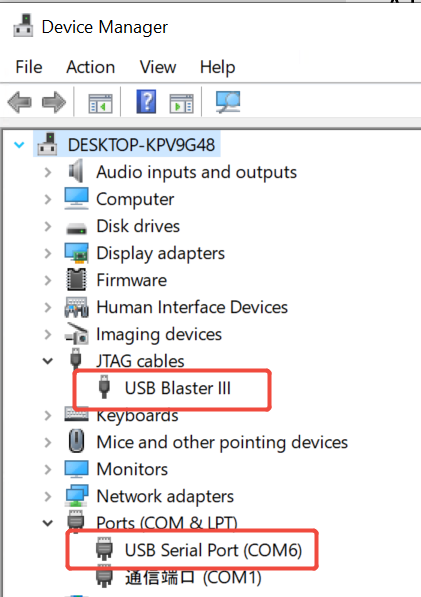
连接USB线后,通常在PC设备管理器中会显示USB Blaster III和一个COM端口号。
2实验任务
设计一个串口回环实验,实现上位机发送数据给开发板串口,串口接收数据后又通过串口发送给上位机。
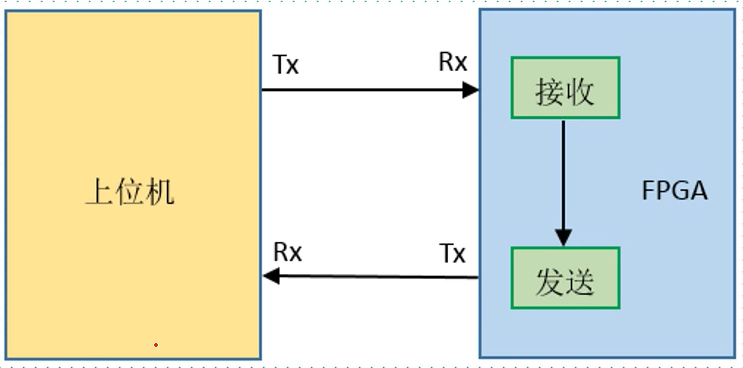
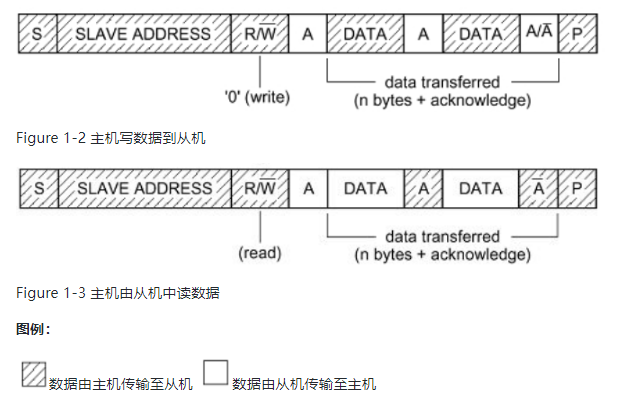
串口时序图如下:

要求:数据位为8位, 停止位1位,无校验位,波特率115200bps。
3模块设计
DE23-Lite的串口回环设计主要是2个模块:串口发送模块(发送数据时将并行的数据转换成串行数据进行传输)和串口接收模块(在接收数据时将接收到的串行数据转换成并行数据)。
系统时钟是50MHz,波特率是115200bps,那么串口发送和接收时,数据的每个位将占用50000000/115200 ≈ 434个时钟周期。
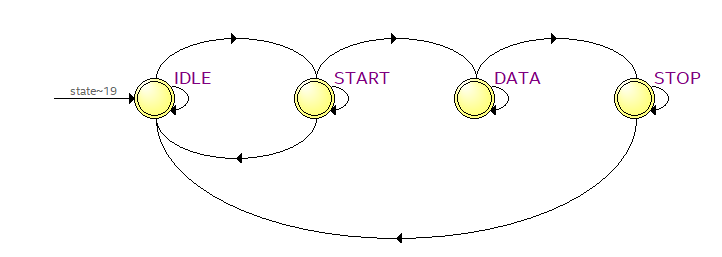
在串口接收模块设置一个4状态的状态机:
空闲状态:在空闲状态下,检测起始位(低电平)。一旦检测到起始位,进入START状态,并设置计数器在半位时间后采样,这样可以确保在位的中心点采样,提高抗噪能力。
起始位检测状态:等待半个位周期后,再次检查线路状态。如果仍然是低电平,确认是有效的起始位,进入DATA状态;否则认为是噪声干扰,返回IDLE状态。
数据位接收状态:在每个位周期的中心点采样数据位,并存入移位寄存器。接收完8位数据后,进入STOP状态。
停止位处理状态:等待一个完整的位周期(停止位),然后将接收到的数据输出,并产生一个时钟周期的接收完成信号。
接收模块工程代码:
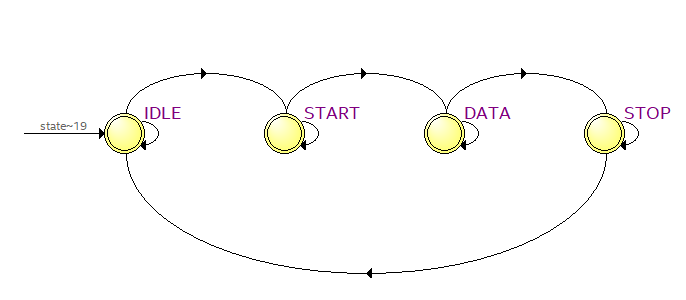
moduleuart_rx( input clk, input rst_n, input uart_rx, output reg [7:0] rx_data, output reg rx_done ); parameterCLK_FREQ=50000000; parameterBAUD_RATE=115200; //波特率计数器 localparam BAUD_CNT_MAX=CLK_FREQ/BAUD_RATE; localparam HALF_BAUD_CNT=BAUD_CNT_MAX/2; reg [15:0] baud_cnt; //状态定义 localparam IDLE=2'd0; localparam START = 2'd1; localparam DATA=2'd2; localparam STOP = 2'd3; reg [1:0] state; reg [2:0] bit_cnt; reg [7:0] rx_reg; reg uart_rx_sync1, uart_rx_sync2; //同步输入信号 always @(posedge clkornegedge rst_n)begin if(!rst_n)begin uart_rx_sync1串口发送模块同样设置了一个4状态的状态机:
空闲状态:空闲状态保持高电平。
起始位发送状态:发送起始位,低电平。
数据发送状态:数据位从最低位(LSB)开始发送,这是UART的标准格式。
停止位发送状态:发送停止位,高电平。
串口发送模块的工程代码:
module uart_tx( input clk, input rst_n, input tx_start, input [7:0] tx_data, output reg uart_tx, output tx_busy ); parameterCLK_FREQ =50000000; parameterBAUD_RATE =115200; // 波特率计数器 localparam BAUD_CNT_MAX = CLK_FREQ / BAUD_RATE; reg [15:0] baud_cnt; wire baud_tick = (baud_cnt ==0); // 状态定义 localparam IDLE =2'd0; localparam START = 2'd1; localparamDATA=2'd2; localparam STOP = 2'd3; reg [1:0] state; reg [2:0] bit_cnt; reg [7:0] tx_reg; // 波特率计数器 always@(posedge clk or negedge rst_n)begin if(!rst_n)begin baud_cnttop文件代码要完成的任务是:
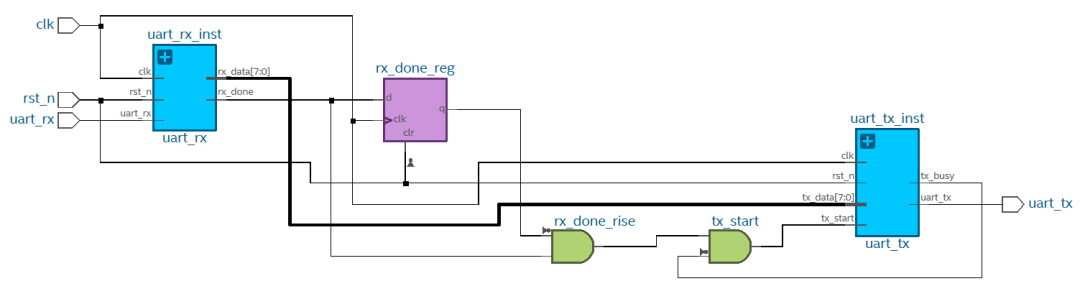
只有在检测到接收完成信号的上升沿时才启动发送
只有在发送器不忙时才启动新的发送
实现了接收数据到发送数据的无缝衔接
moduleDE23_Lite_uart( input clk, input rst_n, input uart_rx, output uart_tx ); /* synthesis keep */wire [7:0] rx_data; wire rx_done; wire rx_done_rise,tx_start; wire tx_busy; // UART接收模块 uart_rx#( .CLK_FREQ(50000000), .BAUD_RATE(115200) ) uart_rx_inst ( .clk(clk), .rst_n(rst_n), .uart_rx(uart_rx), .rx_data(rx_data), .rx_done(rx_done) ); // UART发送模块 uart_tx#( .CLK_FREQ(50000000), .BAUD_RATE(115200) ) uart_tx_inst ( .clk(clk), .rst_n(rst_n), .tx_start(tx_start), .tx_data(rx_data), .uart_tx(uart_tx), .tx_busy(tx_busy) ); // 回环控制逻辑 reg rx_done_reg; always @(posedge clkornegedge rst_n)begin if(!rst_n) begin rx_done_reg仿真代码:
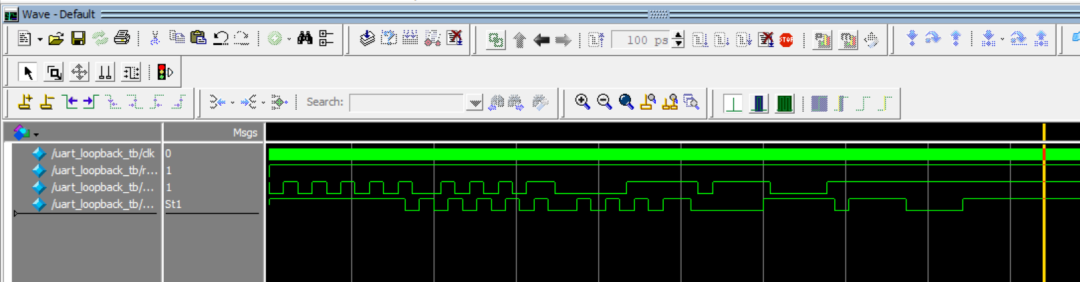
`timescale1ns/1ps module DE23_Lite_uart_tb; // 输入 reg clk; reg rst_n; reg uart_rx; // 输出 wire uart_tx; // 测试参数 parameter CLK_PERIOD =20; // 50MHz时钟周期 parameter BIT_PERIOD =8680;// 115200波特率的位周期(1/115200 ≈ 8.68μs) // 实例化顶层模块 DE23_Lite_uartuut( .clk(clk), .rst_n(rst_n), .uart_rx(uart_rx), .uart_tx(uart_tx) ); // 时钟生成 always begin clk =0; #(CLK_PERIOD/2); clk =1; #(CLK_PERIOD/2); end // 测试任务:发送一个字节 task send_byte; input [7:0] data; integer i; begin // 发送起始位 uart_rx =0; #(BIT_PERIOD); // 发送8个数据位 for(i =0; imodelsim仿真波形:
可以看到:
第一个波特位时间内,rx先发送低电平起始位,然后发送8bit数据01010101(低位在前,8'h55),最后发送高电平停止位;tx则一直是高电平。
第二个波特位时间内,rx先发送低电平起始位,然后rx发送第二个测试数据10101010(低位在前,8'hAA),最后发送高电平停止位;tx则接收到8bit数据01010101。
第三个波特位时间内,rx先发送低电平起始位,然后rx接收第二个测试数据11110000(低位在前,8'hF0),最后发送高电平停止位;tx则接收到8bit数据10101010。
第四个波特位时间内,rx先发送低电平起始位,然后rx接收第二个测试数据00001111(低位在前,8'h0F),最后发送高电平停止位;tx则接收到8bit数据11110000。
第五个波特位时间内,rx保持高电平;tx则接收到8bit数据00001111。
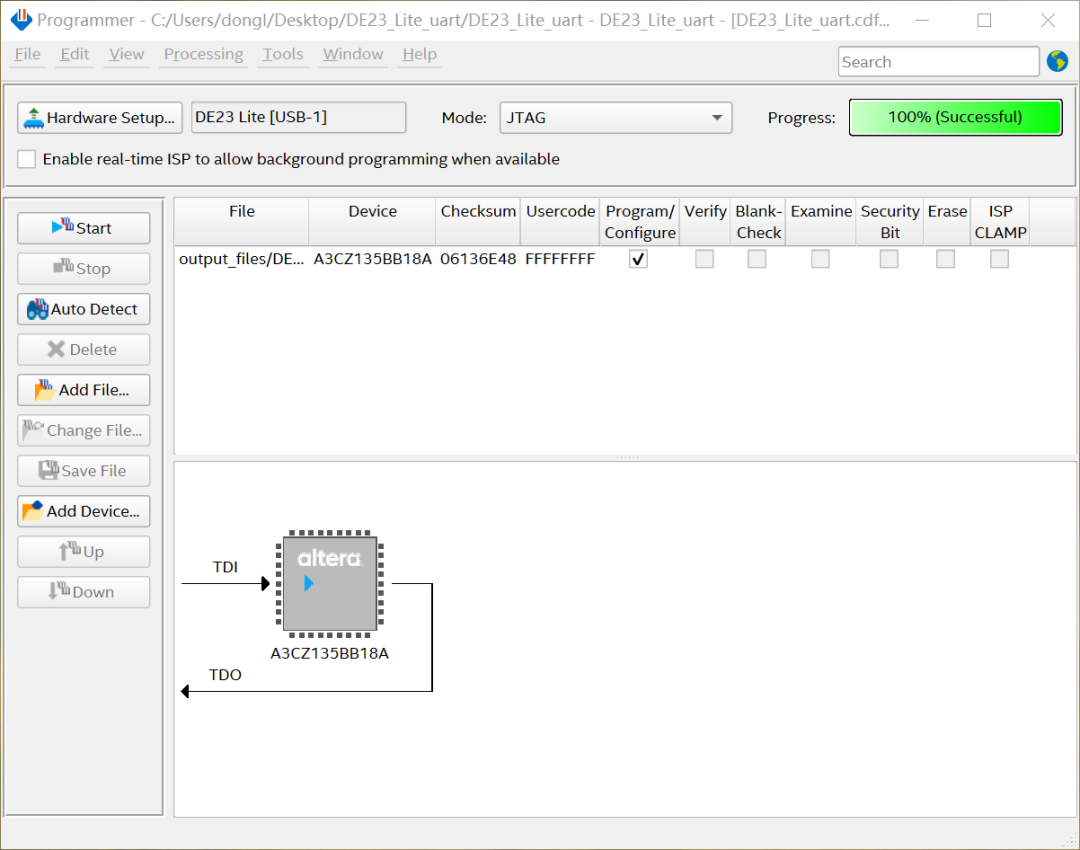
Quartus版本选择:25.1,具体操作参考文章最新版Quartus Prime Pro 25.1 的安装和使用演示(含Questa仿真)
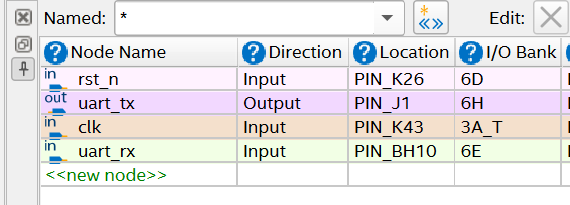
引脚分配:
4下板测试
打开串口工具比如Putty或者是下面截图所示的XCOM,然后按照如下操作去测试:
选择正确的COM口
波特率设置为115200
停止位设置为1位
无校验位
点击打开串口
在发送窗口随便发送数据,可以看到上面接收窗口得到同样的数据显示,表示测试成功。

原文标题:2-基于FPGA开发板DE23-Lite的串口通信设计 (FT2232H)
文章出处:【微信号:友晶FPGA,微信公众号:友晶FPGA】欢迎添加关注!文章转载请注明出处。