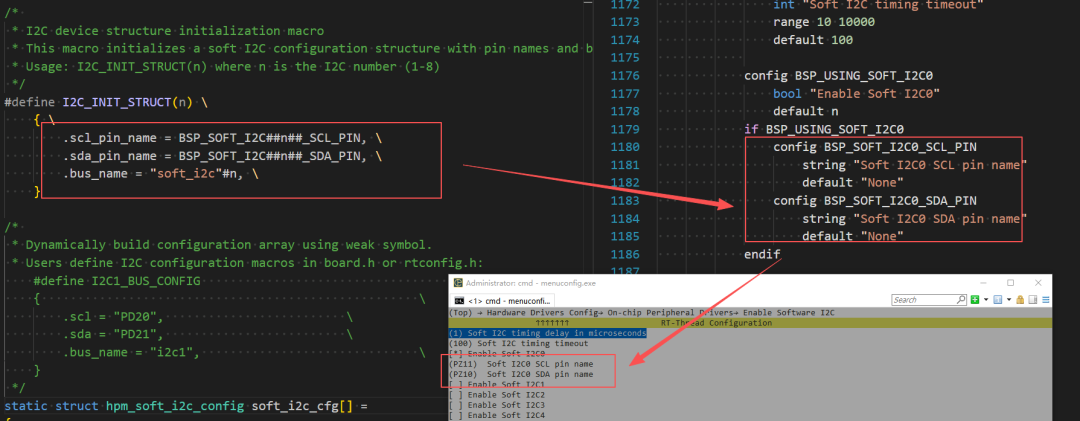
基于 RT-Thread 的软 I2C:比你想象的更简单
先楫 MCU 提供了多达 8 路硬件 I2C 接口,功能非常完善。但在实际项目中,由于 引脚资源紧张 或 引脚复用冲突,硬件 I2C 并不总是一个最优选择。 另一方面,I2C 在很多场景下仅用于 初始化配置 或 低频读写,对性能和带宽的要求并不高。 在这种情况下,使用 GPIO 模拟 I2C(即软 I2C)就显得非常有价值: 既能节省宝贵的硬件资源,又能满足功能需求,还能提升系统的灵活性。 本文将
关于「先楫半导体」的技术文章、设计资料与工程师讨论,持续更新。
先楫 MCU 提供了多达 8 路硬件 I2C 接口,功能非常完善。但在实际项目中,由于 引脚资源紧张 或 引脚复用冲突,硬件 I2C 并不总是一个最优选择。 另一方面,I2C 在很多场景下仅用于 初始化配置 或 低频读写,对性能和带宽的要求并不高。 在这种情况下,使用 GPIO 模拟 I2C(即软 I2C)就显得非常有价值: 既能节省宝贵的硬件资源,又能满足功能需求,还能提升系统的灵活性。 本文将
一、系统概述 数字焊机与工业机器人通信网关是连接焊机与机器人的核心设备,需解决协议不兼容、实时性不足、多设备协同等问题。本设计基于RT-Thread实时操作系统,采用EtherCAT(机器人侧)与CANopen(焊机侧)协议,实现焊机与机器人的高速、可靠通信,支持实时数据采集、远程控制、状态监测等功能。 二、系统架构设计 系统采用分层架构,分为硬件层、RT-Thread系统层、协议栈层、应用层,