工程名称:【开源】桌面级 机器人——小步机器人
工程作者:马道机器人
前言
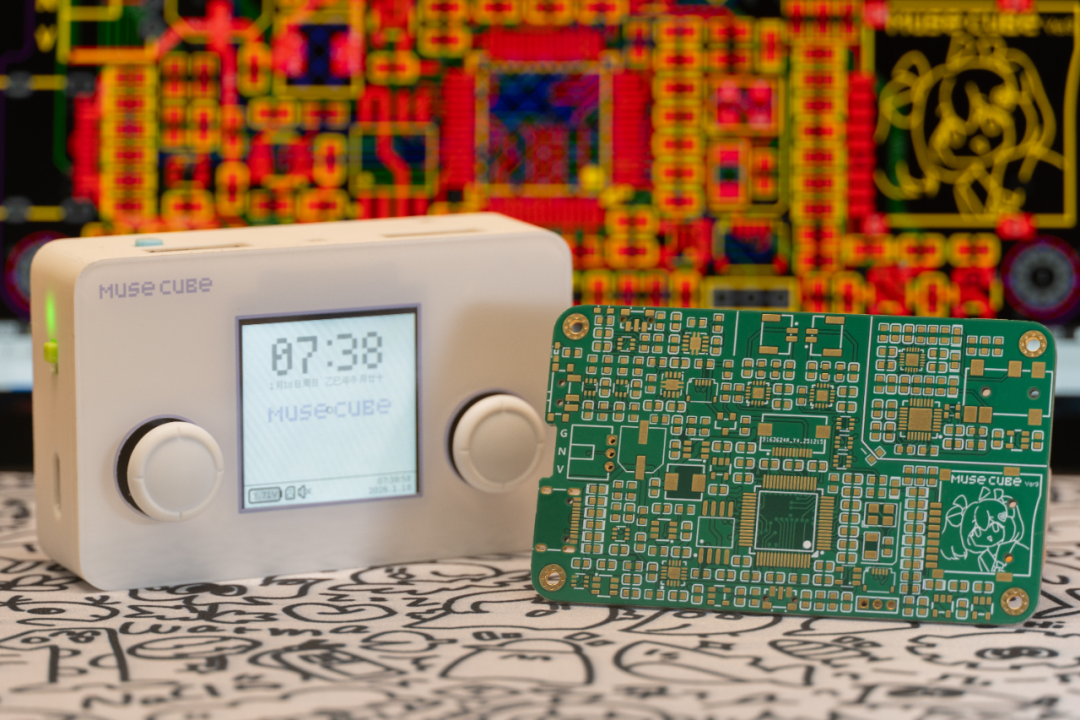
我做了一个全向移动机器人!
还能发射玩具弹!!
*0***1
小车的8个功能?
小车分为云台和底盘两部分:

实现以下功能:
云台支持俯仰角约±18度
云台能定航
云台能发射玩具弹(支持物理解锁/锁定该功能)
底盘能全向移动
底盘支持自旋模式:自转的同时全向移动
底盘支持35种灯效
无图无真相!演示图(4个)如下:
发射**玩具弹↓**
(并不精准,也没有力度,玩具级)
调整云台仰俯角度↓
自旋**+全向移动↓**
36种光效↓
(只演示了部分光效)
它是怎么设计的?接下来,咱们瞅瞅作者的硬件设计方案!
*0***2
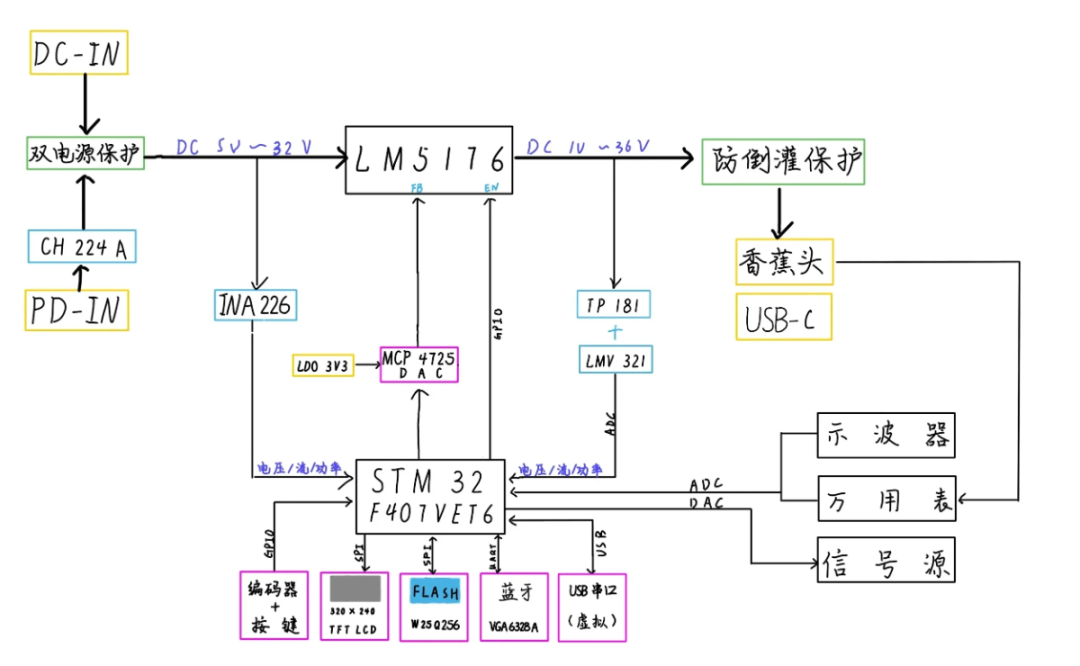
硬件设计方案
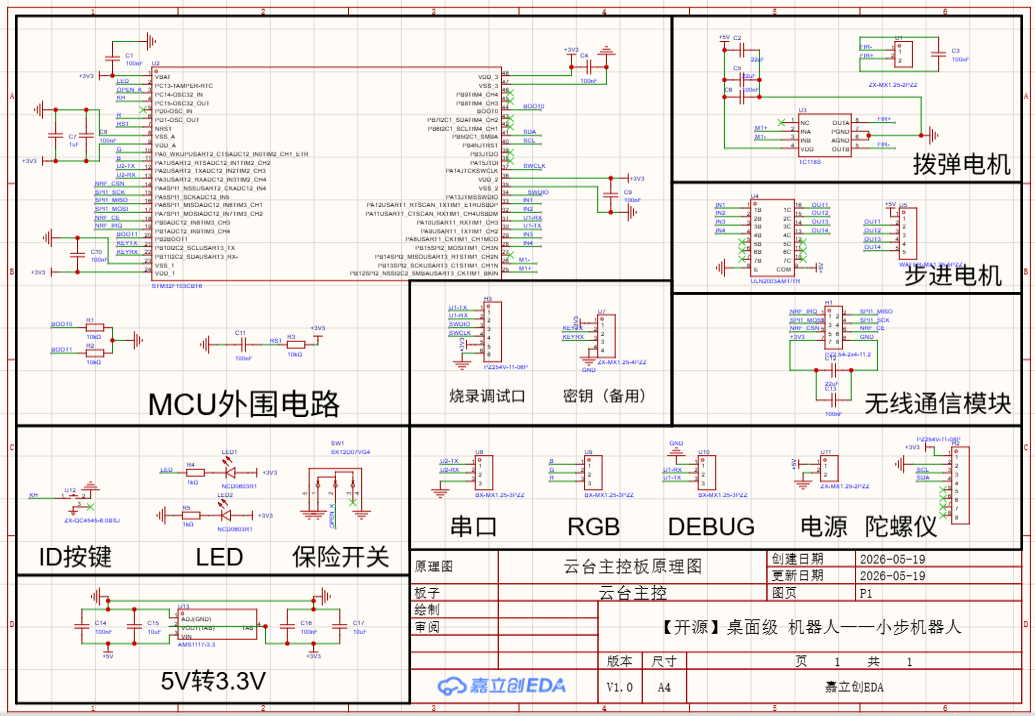
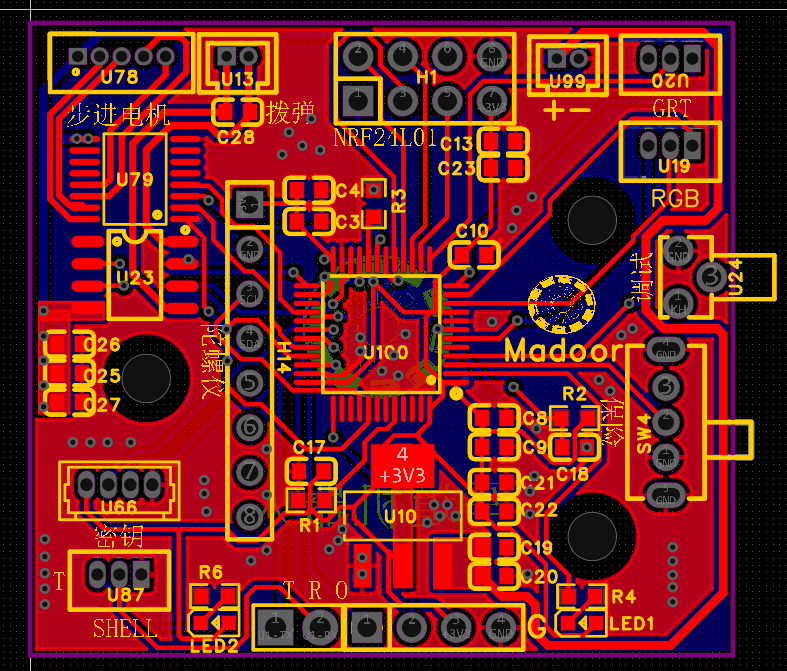
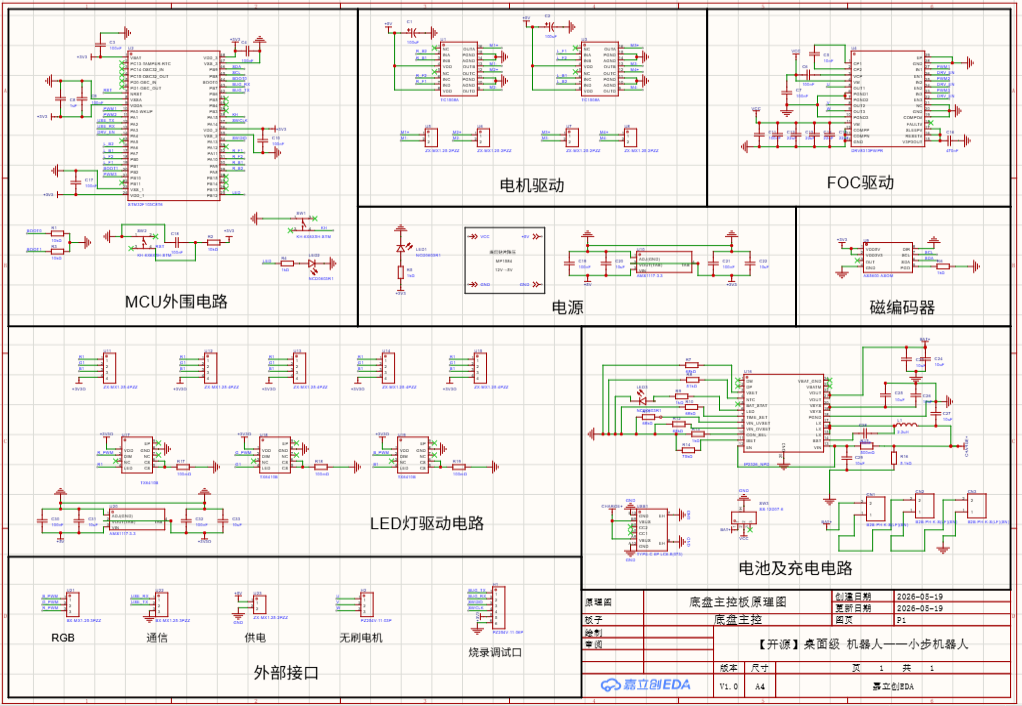
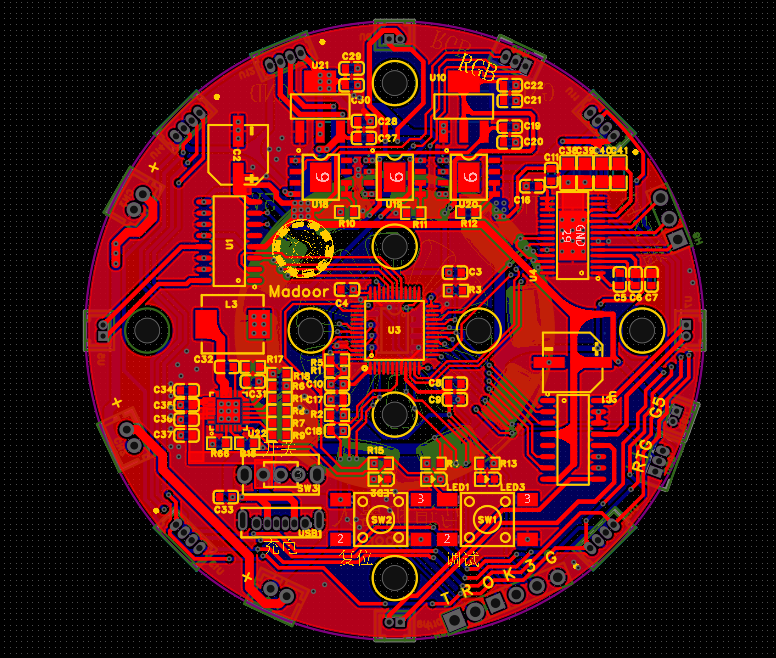
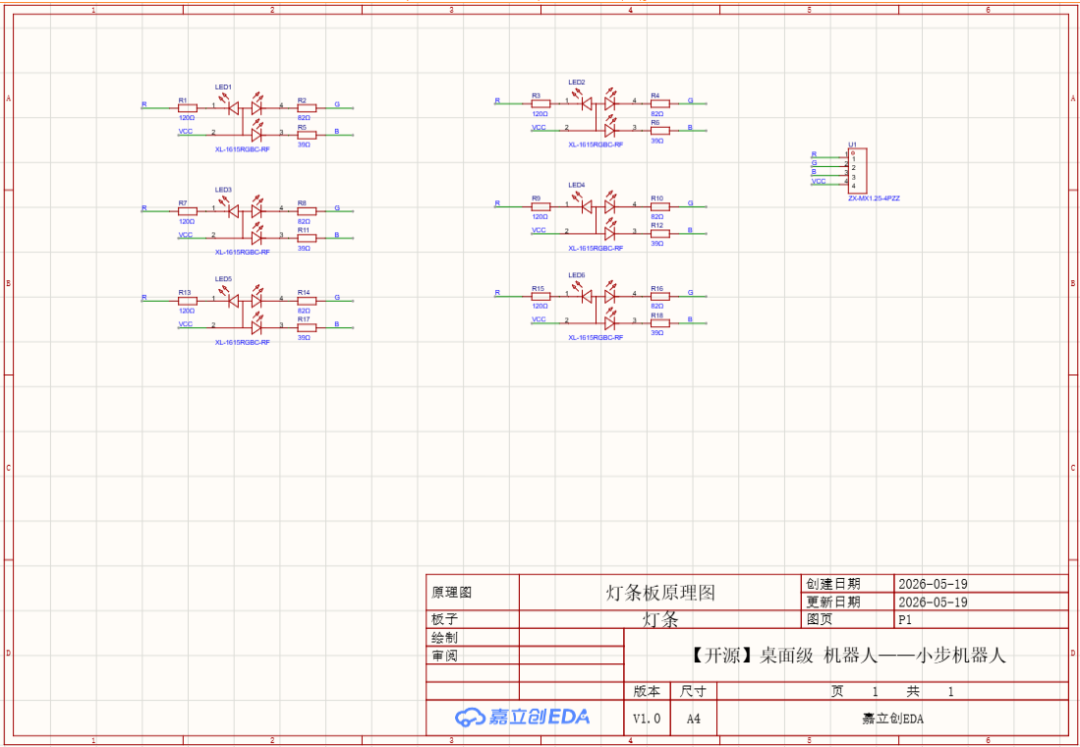
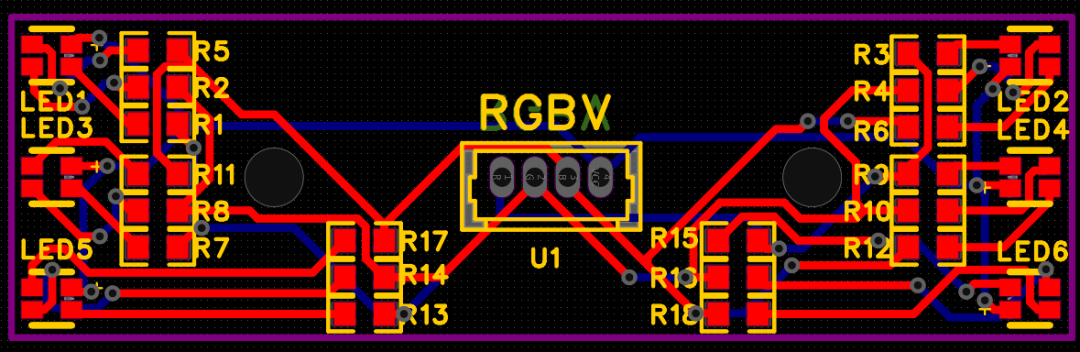
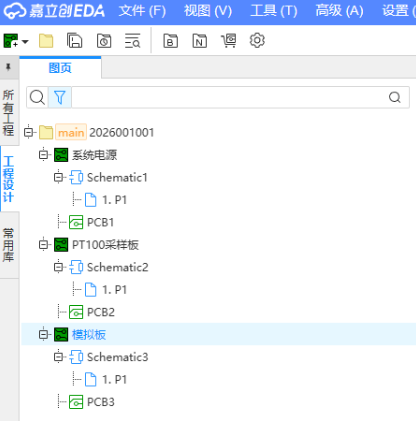
作者通过嘉立创EDA,设计了3块PCB。
云台主控板
底盘主控板
灯条板
硬件参数
主控:STM32F103C8T6
有刷直流电机驱动:TC118S、TC1508A
达林顿晶体管阵列:ULN2003A
无刷直流电机驱动:DRV8313PWPR
位置传感器:AS5600-ASOM
电池管理:IP2326_NPD
LED驱动:TX6410B
RGB LED:XL-1615RGBC-RF
陀螺仪:外接MPU6050模块
10
DIY所需工具:电烙铁,502胶水,J-LINK烧录器,内六角螺丝刀,十字螺丝刀,老虎钳,斜口钳,USB转TTL串口工具
*0***3
软件说明
作者开放了固件,烧录即可完成小车制作。
烧录固件说明
用 J-Link 或 ST-Link 烧录器,配合烧录软件(如 J-Flash或STM32CubeProgrammer),分别把
-
chassis.hex写入底盘主控
-
gimbal.hex 写入云台主控
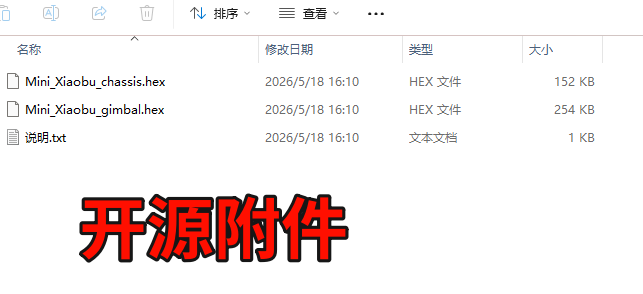
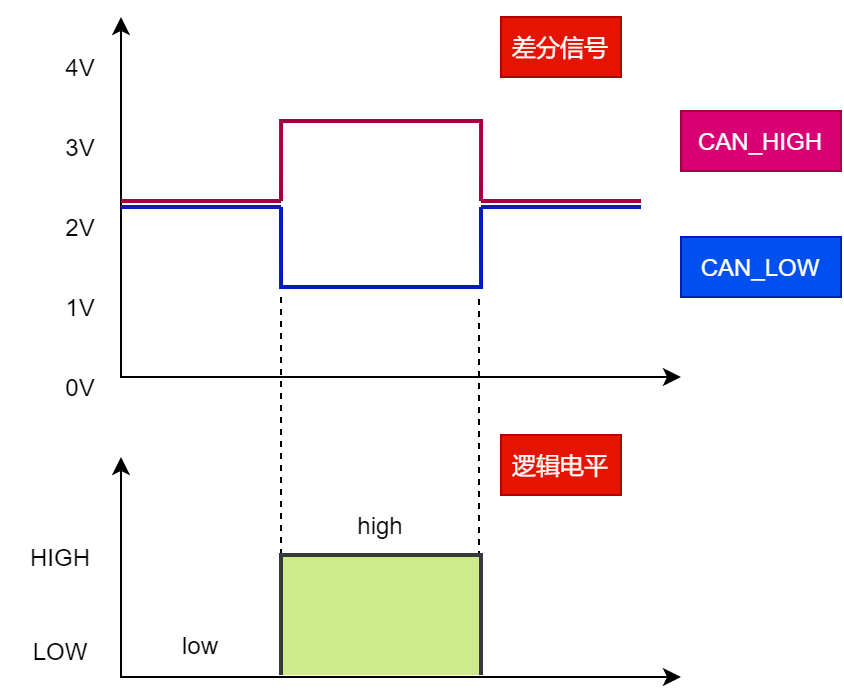
*运动学解算公式、PID 闭环控制、陀螺仪数据融合、CAN 通讯协议,全部被编译在这两个文件里。
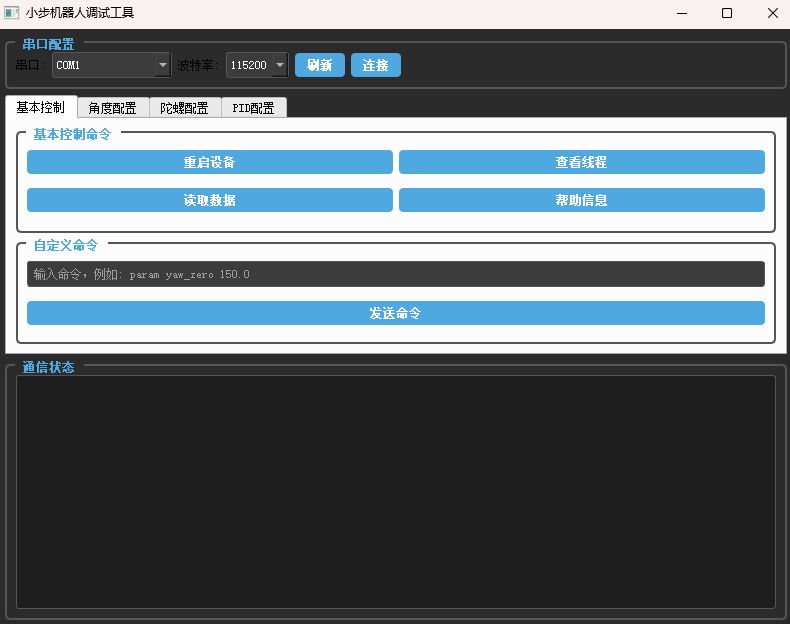
作者还提供工具(如下图),你可以在电脑上实时看波形、改参数,不用反复拔线烧录。
*0***4
开源网址
你喜欢这个作品吗?如果是你,你会怎么设计它?欢迎评论区唠唠丫!
目前,项目已全开源!
——想复刻****?想给作者**点赞*?下面会附上开源网址↓,欢迎大家在遵循作者开源协议的情况下,友好复刻学习~~*
开源网址:https://oshwhub.com/eda\_cprquqpow/xiao-bu-ji-qi-ren










评论区
登录后即可参与讨论
立即登录