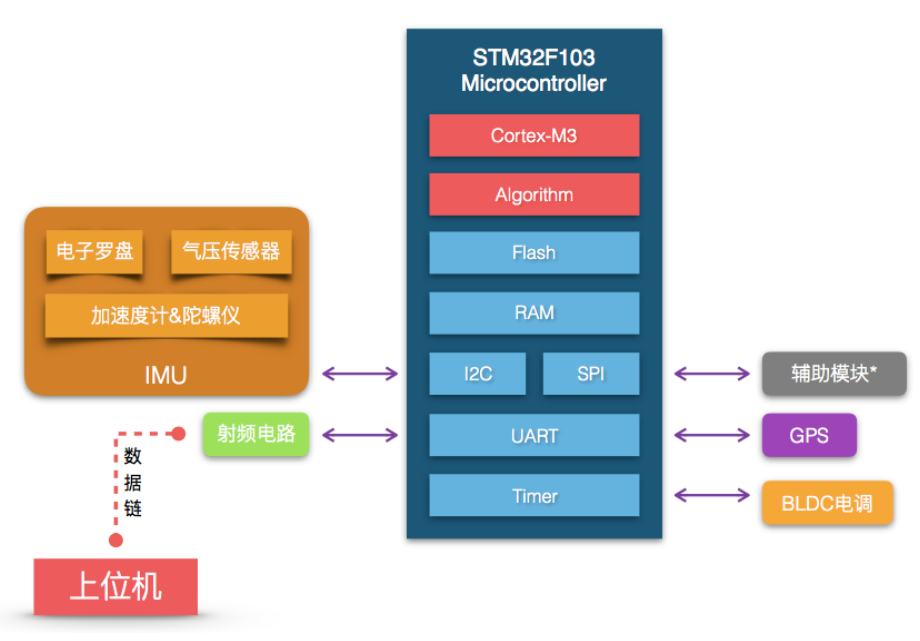
轻量级无人机飞控。采用STM32F4系列实现飞控算法,整合MPU6050姿态传感器和PWM电机驱动。
- 项目框架
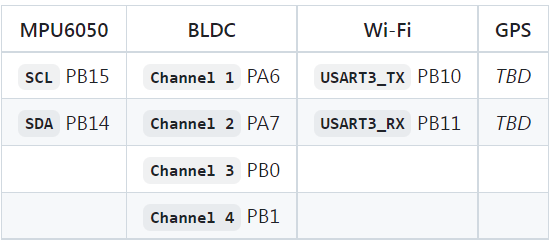
- IO接口分配
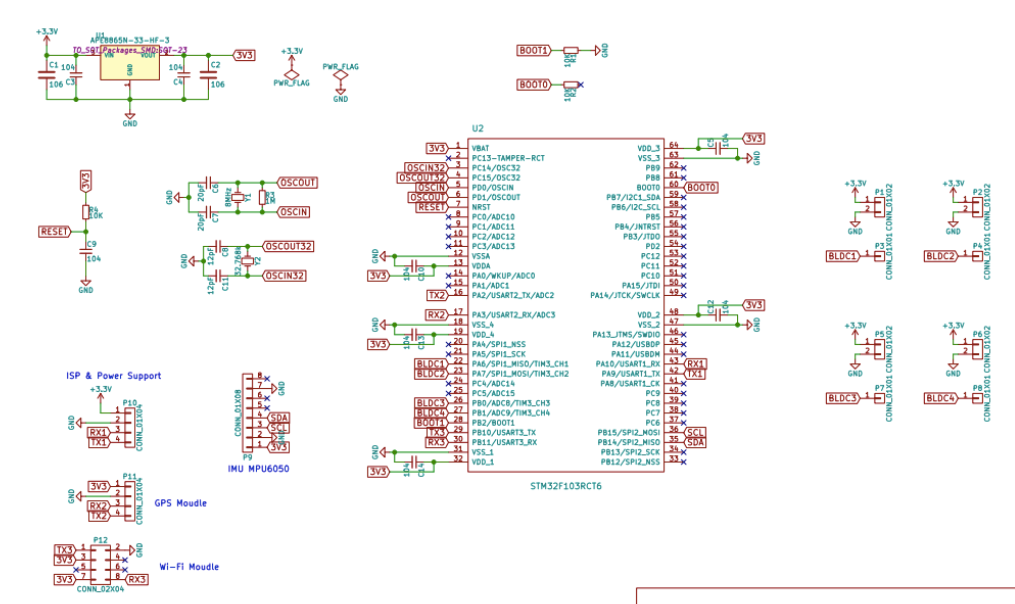
- 原理图
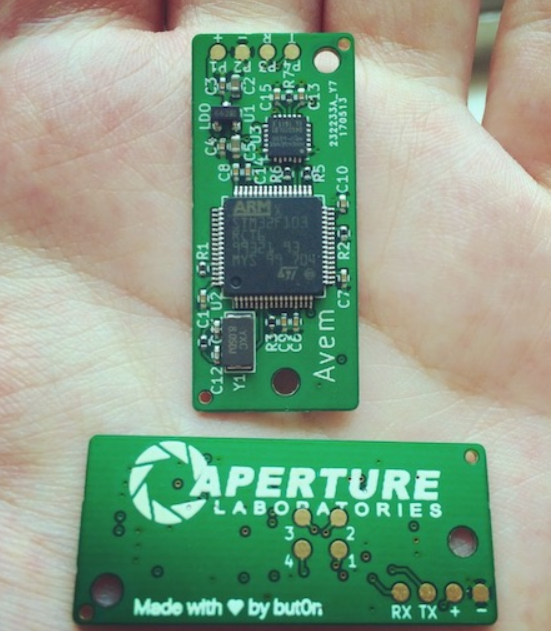
3PCB
如何下载资料
不会获取的同学,看一下下方获取资料视频教程。
轻量级无人机飞控。采用STM32F4系列实现飞控算法,整合MPU6050姿态传感器和PWM电机驱动。
3PCB
如何下载资料
不会获取的同学,看一下下方获取资料视频教程。
电源、防护是无人机稳定飞行、杜绝炸机、长效续航的底层核心;一站式开发套件则是快速搭建原型、压缩研发周期、降低试错风险的关键利器。今天带大家全面拆解意法半导体四大核心支撑体系——电源管理、接口防护、射频匹配、标准化开发套件,为无人机规模化量产提供完整闭环解决方案。 电源管理IC:高效供电,拉长整机续航 电源芯片直接决定无人机发热控制与续航表现,ST丰富电源产品线覆盖总线供电、MCU/传感器低压供电、

在目前的航空航天项目中,太阳能电池板几乎是航天器的“标配”,而从科幻小说到电影,有一个同样也是利用光能,但比电池板更浪漫的设定那就是“太阳帆”——不需要额外的推进器和燃料,仅靠光压来在宇宙中乘风破浪。 但现实情况是,科幻归科幻,现实航天中的太阳帆却一直是个“难啃的骨头”。不过最近,得克萨斯农工大学团队发表了一项关于“超射流(Metajet)”超表面技术的研究,给陷入瓶颈的太阳帆技术带来了一线破局的
近日,Anthropic 旗下 Claude 官方账号在 X(原 Twitter)展示了一系列来自 Code with Claude 开发者活动的 AI Agent 作品——这些作品均基于乐鑫信息科技 (688018.SH) ESP32 硬件构建。 ESP32:会“陪伴”的 AI 硬件 在 Code with Claude 活动现场,Anthropic 官方为每位参会者提供一台搭载乐鑫 ESP32
历时三载潜心编撰,匠心执笔终成佳作!由航顺芯片深度主编的《国产微控制器HK32开发与应用入门》正式出版发行,成功纳入“十四五”普通高等教育规划教材序列。 此书的正式面世,不仅有力助推国内嵌入式科技教育自主化建设,夯实本土芯片人才培育根基,更全面提升航顺芯片学术著作编撰与专业教材出版整体水准,以本土实战内容赋能高校教学一线。 本书编撰阵容实力卓然,企业核心骨干倾力参编:航顺芯片创始人/董事长/CE
一年前,瑞萨电子推出了一个大胆的全新概念——Renesas 365。它由Altium提供技术支持,旨在整合当下嵌入式系统设计中日益碎片化的流程。当时,我们的云端互联开发平台尚在成形之中,但愿景已然清晰:随着工程师从概念阶段迈向产品实现,他们迫切需要一种更智慧的方式,去组织、简化、情境化并整合那些横跨硬件、软件、生产力工具与设计团队的复杂工作流。在最近于德国纽伦堡举行的Embedded World展

在智能化与数字化持续发展的今天,芯片产业不断迈向智能化、场景化和生态化,开发者生态正在成为驱动技术创新与产业落地的重要力量。 多年来,围绕MCU技术研发、产品应用与产业协同,兆易创新GD32持续推进开放、协同、可持续的开发者生态建设,致力于为全球开发者、企业客户与生态伙伴打造更高效、更完整的技术创新环境。 近日,GD32 MCU 开发者社区已正式上线。 作为GD32 开发者生态的重要载体,GD32
亲爱的开发者朋友们,睿擎平台于 2026 年 4 月 2 日正式发布了 V26.04.02 版本更新。本次更新在 RC3506 与 RC3562 双平台上同步发力,带来了 DSMC 驱动读写能力补全、共享内存(SHM)示例工程、NFS 启动脚本增强以及虚拟网卡默认 IP 自动分配等多项重要特性,进一步完善了 AMP 混合部署体验和工业外设驱动生态。 一、更新概览 本次更新覆盖内核、应用 SDK、L

1 CRC简介 CRC (Cyclic Redundancy Check)循环冗余校验,是一种基于二进制模 2 除法的数据校验算法。它通过对原始数据进行数学运算,生成一段固定长度的校验码(CRC 值),接收方或读取方使用相同算法重新计算 CRC 值,与校验值对比,判断数据是否完整或传输是否出错。 2 CRC算法的5个参数 一套 CRC 算法由以下 5 个参数唯一确定: 位宽(Width):CRC
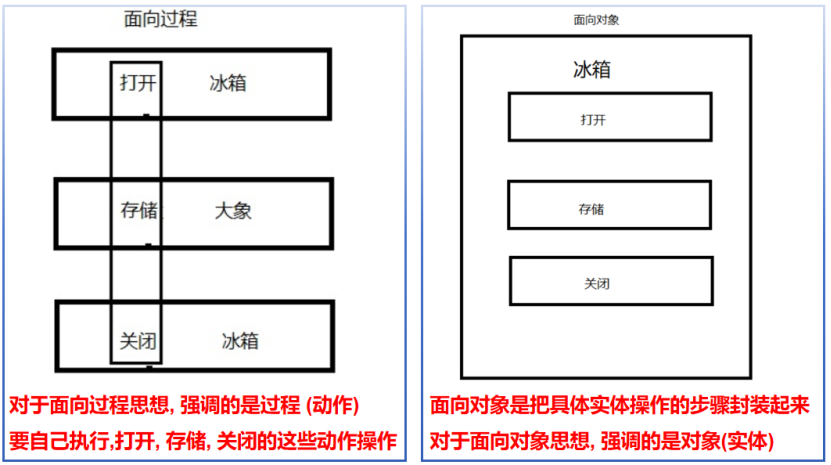
1.1 面向过程编程与面向对象编程 OOP 在嵌入式开发中,我们往往使用 C 语言进行编程,将待完成的问题看作一系列需要完成的任务,函数则用于完成这些任务,解决问题的焦点集中于函数,这就是所谓的面向过程编程。 与之相对的是面向对象编程,它把对象作为程序的基本单元,一个对象包含了数据和操作数据的函数,相同属性和操作方法的对象被抽象为类。以在工业制造上,使用模具来铸造机壳和零件为例,类
之前介绍过使用backtrace的方式定位程序崩溃问题,本篇来介绍另一种方式,通过生成core-dump文件,再通过gdb工具来定位程序崩溃问题。 关注“码农爱学习”,设置“星标公众号” 1 使用core-dump分析崩溃的条件 1.1 开启core-dump文件的生成条件 解除core 文件大小的限制,有临时生效和永久生效两种方案,在本篇的例子中,在Ubuntu中使用临时生效的方式,嵌入式Li
2026年4月17日,北京——作为国内领先的电子技术门户与工程师社区,21ic电子网今日正式公布“21ic 2026年度MCU产品奖”评选结果。本次评选聚焦MCU在“应用定义芯片”时代的垂直技术突破与行业贡献,不设单一“最佳产品奖”,而是根据底层技术演进与应用长板,划分为多个专业赛道,旨在为广大设计工程师提供权威、实用的选型参考。 本次评选严格考察产品的量化参数(如主频、功耗、环路延迟、采样精度等
4月17日,2026嵌入式及边缘AI技术生态大会在深圳举办。安谋科技(中国)有限公司(以下简称“安谋科技”)受邀出席并发表演讲,深度解析了旗下“极术社区”全新上线的「小龙虾 on Arm」一键部署工具JishuShell如何助推Agentic AI加速在端侧部署与落地,并分享了相关技术路径与生态实践。现场还展示了在生态伙伴开发板上部署JishuShell的实际效果,吸引众多行业嘉宾与开发者驻足交流
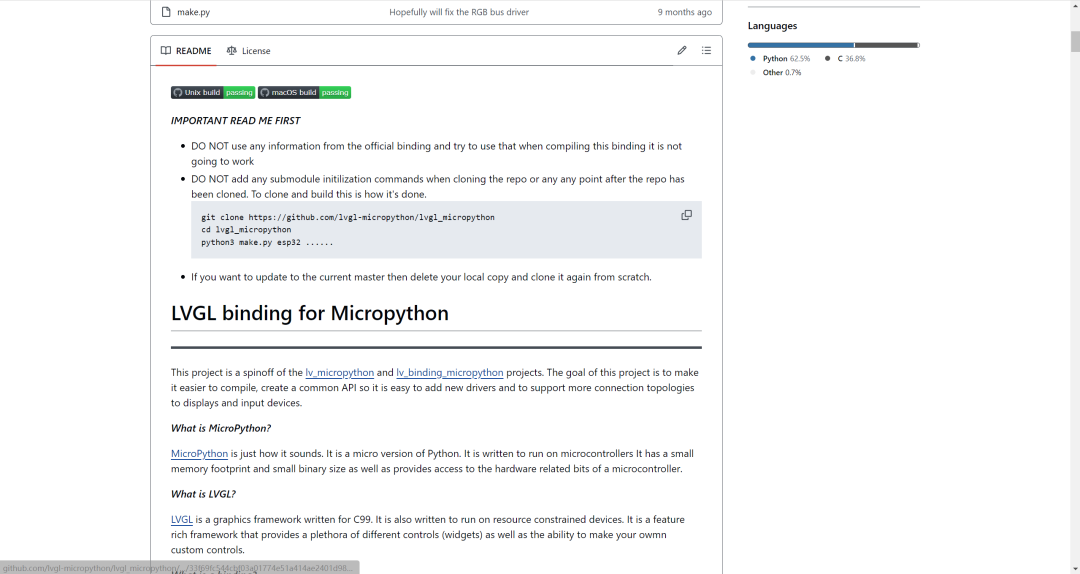
一、什么是 MicroPython? MicroPython 是面向微控制器的 Python 语言。借助 MicroPython,你可以编写 Python3 代码,甚至在资源受限的裸机架构上运行它。 💡 基础知识补充: 裸机架构 :指没有操作系统(OS)、直接在硬件上运行程序的环境,资源(RAM、Flash 存储)非常有限,比如 ESP32、STM32 等单片机。 Python3 兼容性 :
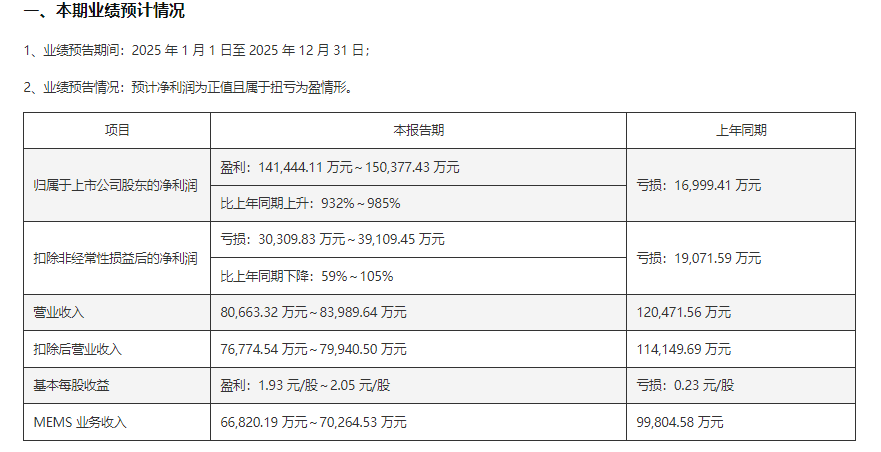
赛微电子预计2025年净利润达15亿元,同比增长985%,主要由于出售瑞典Silex控股权。北京FAB3产能爬坡持续推进,但收入下滑。
2026年5月5日,马来西亚SEMICON —— 国民技术(股票代码:300077.SZ,02701.HK)N32H47x/48x系列MCU的STL软件测试库正式获得SGS颁发的IEC 61508 SIL 3(SC3)功能安全证书。同日,SGS在SEMICON展会现场为国民技术举行颁证仪式。 这标志着国民技术MCU产品的设计、开发、生产及维护流程已全面符合功能安全领域的国际核心准则,达到最高安全完
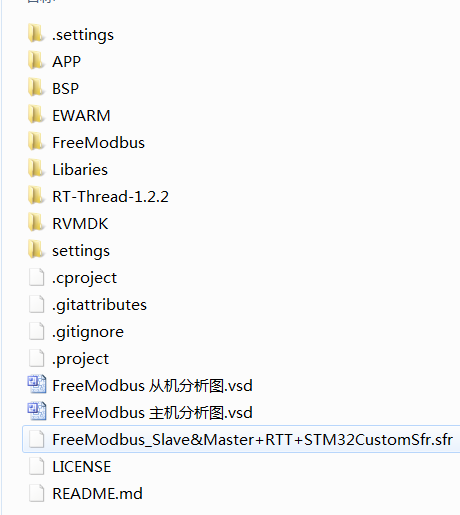
FreeModbus是一款开源的Modbus协议栈。同时网上也没有发现比较好的开源的Modbus主机协议栈,所以才开发这款支持主机模式的FreeModbus协议栈。本版FreeModbus版本号更改为V1.6,特性如下: 新增加的主机源码与原有从机的风格及接口保持一致; 支持主机与从机在同一协议栈运行; 支持实时操作系统及裸机移植; 为应用提供多种请求模式,用户可以选择阻塞还是非阻塞模式,自定义
1、前言 在嵌入式MCU软件开发过程中,程序分层设计也是重中之重,关系到整个软件开发过程中的协同开发,降低系统软件的复杂度(复杂问题分解)和依赖关系、同时有利于标准化,便于管理各层的程序,提高各层逻辑的复用等。 2、分层介绍 硬件抽象层(HAL) 嵌入式开发的核心就是芯片,它提供固定的片内资源(常用的有I/O,ISR,TIMER等,稍微好点的还有ADC,SPI等硬件资源,不需要芯片外围ADC采集芯
在数字化时代,数据处理和分析已经成为各个领域的核心需求。为了提升计算效率,我们常常会使用并行计算技术。与传统的串行执行模型不同,并行计算可以划分成时间并行和空间并行。时间并行就是流水线技术,空间并行使用多个处理器执行并发计算。目前以研究空间并行为主。从空间并行的角度来说,并行计算将一个大任务分割成多个子任务,每个子任务占用一定处理资源。并行计算中不同子任务占用的不同的处理资源来源于
在边缘智能时代,新一代MPU和MCU是驱动前沿应用开发的核“芯”引擎。恩智浦根植于深厚的专业积淀,通过持续创新,不断推出具有前瞻性的MPU / MCU产品,并完善开发技术生态,得到了工程师开发社区的广泛认可,并在系列行业评选中屡获殊荣! 1 i.MX RT1180跨界MCU 2026年度MCU产品奖 - 实时控制MCU/DSP - 恩智浦的i.MX RT1180跨界MCU荣膺国内知名电子技术
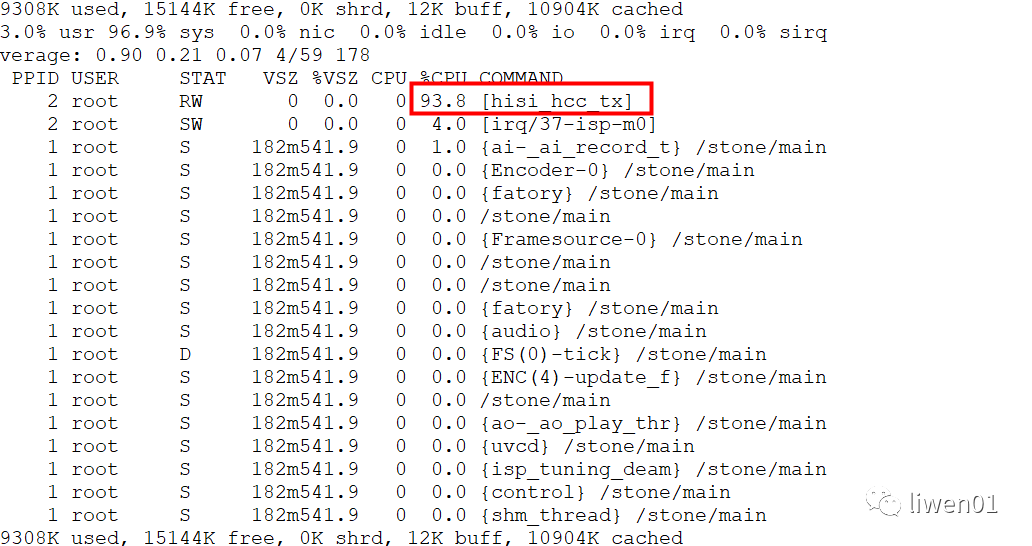
liwen01 2022.08.26 一、环境: 君正:T31ZL SDK版本:Zeratul_Release_20201230 WiFi 模块: Hi3861(单总线发送数据) 杰理:5226B方案屏幕(UVC) 二、问题现象: 可以单独使用UVC进行图像传输 可以单独使用SDIO进行wifi网络数据通信 如果UVC与SDIO wifi同时一起工作,系统负载就接近100%,整个程序异常
评论区
登录后即可参与讨论
立即登录