这几年,人形机器人产业大爆发。就拿咱们国内来说,宇树科技、智元机器人、众擎机器人、优必选和傅利叶智能,随便一数就是一大串,当然还有很多其它的公司,这里就不一一罗列了。说实话,我翻了这些公司的公开资料,发现一个有意思的现象——大家的硬件方案越来越像,真正拼的还是算法和落地场景。
有粉丝朋友希望我出一期机器人的科普,说网上的信息虽然很多,但知识点比较零散,还是比较喜欢看我写的科普文章。我没做过机器人整机产品,但是机器人内部的核心部件——比如RK3588主板、电机以及各类传感器,都是咱们电子人日常打交道的东西。
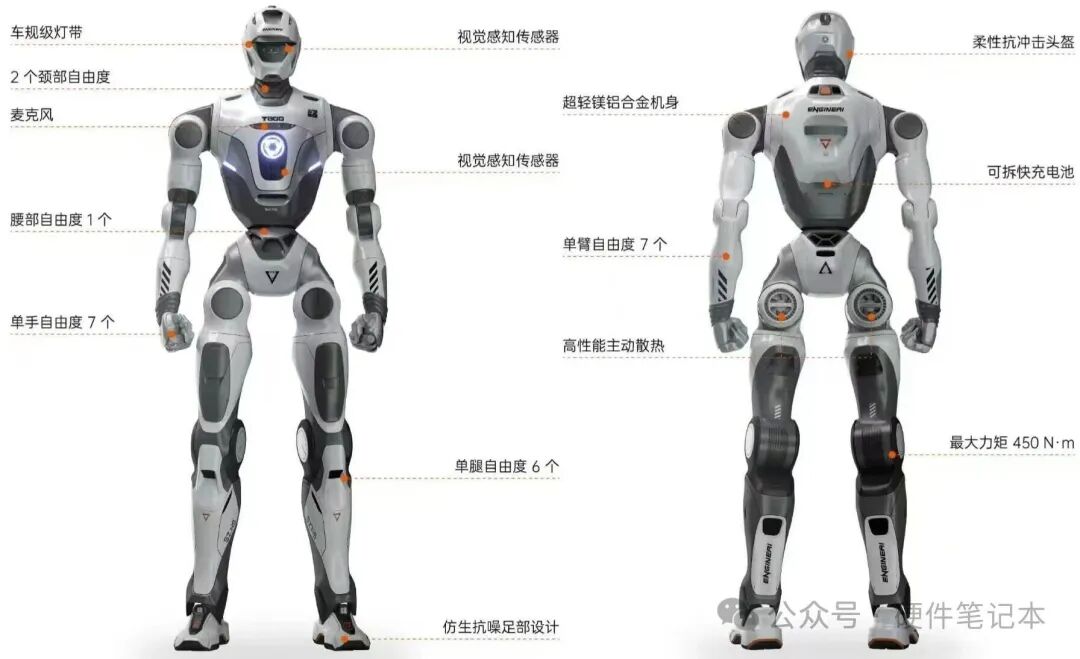
图源:众擎机器人
然后我自己去学习,了解,也参考了一些大厂官网的公开资料,于是有了这篇文章。今天咱们就从一个硬件工程师的角度,把一台典型的人形机器人从头到脚拆开,跟你聊聊它主要由哪些部分构成。
这篇文章尽量写得通俗、全面,目标是成为全网最全的那一篇。文章有点长,一口气看完有点难。开头会碰到一些专业名词,这很正常——篇幅有限,我没法细讲,但后面会尽量说得通俗易懂。建议先收藏,之后再慢慢看。
01
总框架和难点
先拉个总纲。一台完整的人形机器人,从硬件系统角度,可以粗暴地切分成五大块:
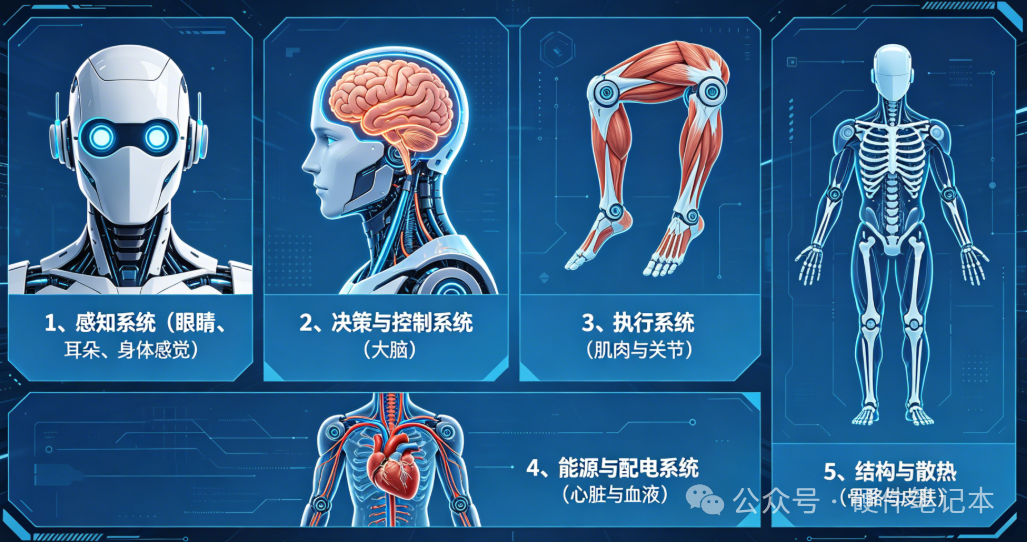
1、感知系统(眼睛、耳朵、身体感觉):让机器人知道周围有什么、我现在是什么姿势。核心部件包括深度相机、激光雷达、惯性测量单元(IMU)、关节编码器、六维力传感器、触觉传感器。
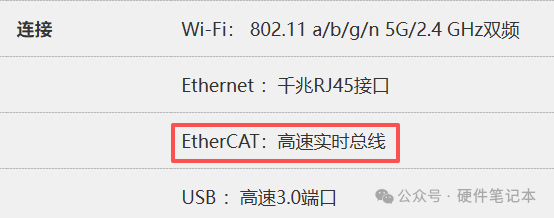
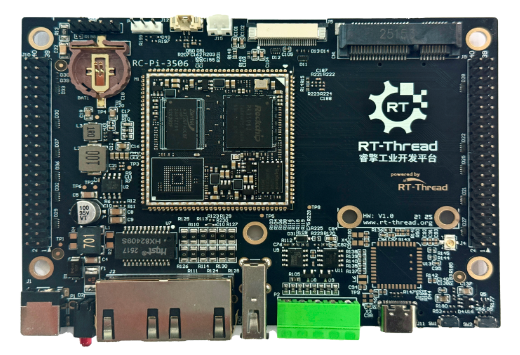
2、决策与控制系统(大脑):处理信号、跑算法、下指令。相当于一个实时战斗指挥部。核心部件是工控机/嵌入式板卡(如RK3588)、实时通信总线(如EtherCAT)。
3、执行系统(肌肉与关节):把电转化为力、再转化为动作。核心部件是无刷电机 + 减速器(谐波/行星)+ 伺服驱动器,这三者集成封装成一个关节模组,再加上灵巧手里的微型驱动与腱绳。
4、能源与配电系统(心脏与血液):供电、稳压、保护电路。核心部件是高倍率锂离子电池组、BMS、多路隔离稳压电源板。
5、结构与散热(骨骼与皮肤):承重、减重、隔热、排热。材料有铝合金/碳纤维骨架、导热硅脂/散热片、风冷或水冷散热。
我自己画过几块工控板,有个体会特别深:机器人内部这五大块不是独立存在的,你动一个地方,有可能其他几个都得跟着调。这也是为什么小厂很难攒出一台好用的整机。
框架清楚了,再说几个真正卡住行业脖子的技术点,理解它们,你就理解了人形机器人80%的难度。

第一个难点:关节的能量密度与散热。电机扭矩和体积/重量天生矛盾。你要让机器人像人一样灵活,就得用很多小关节,但小电机扭矩不够;用大电机又太重,膝盖扛不住。难点是在巴掌大的体积内,塞进能输出几十牛米扭矩的电机加减速器,同时还要把发热迅速散掉,否则电机退磁导致工作异常了。我以前调试过一款大功率电源板,温度一过90多度,管子就很危险了。机器人关节比那更苛刻——塞在壳子里还没地方装大散热片。
第一个难点:实时同步控制与动平衡。机器人走路时,零点几毫秒内,全身几十个电机必须同步响应,否则就像一群人抬轿子步调不一致,立刻晃倒。在高性能机器人中,依赖EtherCAT级别的高速总线,算法上要把IMU、关节编码器、脚底压力数据融合到一块,毫秒级算出质心位置并调整步态。
第三个难点:能量管理与续航。人形机器人全身几十个电机同时发力,功率轻松上几百瓦甚至上千瓦,但电池能量密度几十年没大突破。目前普遍只能跑2到4小时,而且电量低了扭矩就掉,走路姿态会变,这是一个很难解决的矛盾。
第四个难点:手部精细操作。人手有20多个自由度,传感器密度极高。要在机器人手上实现类似功能,既要十几个微型驱动,又要密集的触觉反馈,还要控制抓握力度不捏碎东西。很多所谓灵巧手到了真实场景就是一抓就掉或者一捏就碎,比走路还难解决。
清楚了总框架和难点,我们现在从头到脚,一个一个拆。
02
机器人的组成部分
先看头部
咱们从头开始。人形机器人的头里,最重要的不是CPU,而是传感器群。
最核心的是视觉系统。绝大多数人形机器人会用双目或RGB-D深度相机,比如Intel RealSense系列或者奥比中光的深度相机。两个摄像头像人的两只眼睛,通过视差算出物体的距离。
头部通常还有惯性测量单元(IMU)。这东西一般由三轴陀螺仪加三轴加速度计组成,告诉你头现在往哪转、加速度是多少。整个身体的姿态稳定,在一定程度上靠头部的IMU做初判。
部分高端机型还会在头部加3D激光**雷达(LiDAR)**,比如宇树H1头上顶的那颗。激光雷达直接扫描周围环境,生成点云地图,用来做SLAM定位和导航。

图源:宇树
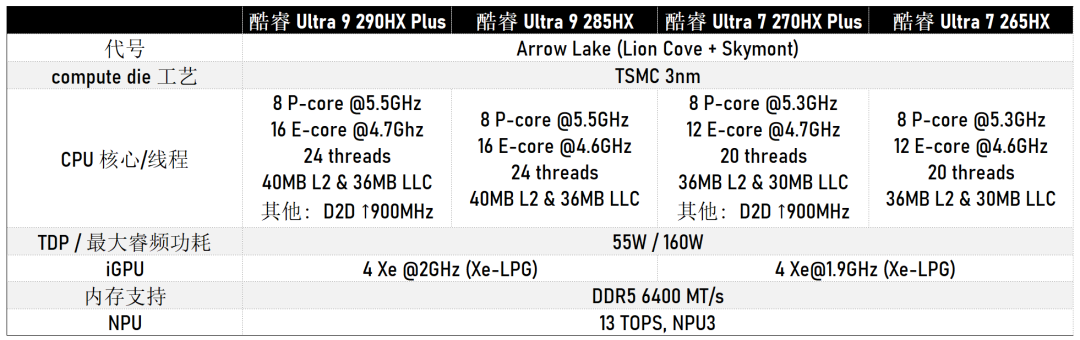
那脑子,也就是主控计算机放在哪?不一定在头部。很多设计会把它塞进胸腔,防止头部过重导致脖子电机负荷太大。主控计算机通常是x86(比如Intel Core i7/i9 / Ultra 系列)或者ARM架构的SoC(如 NVIDIA Jetson、瑞芯微 RK3588、高通骁龙),跑Linux + ROS 2。这块板子负责传感器数据处理、决策规划、电机指令下发。简单说,它就是机器人的大脑。
脖子和关节,全是执行器
往下走就是脖子。脖子一般有2到3个自由度,能抬头低头、左右转头。每个自由度背后是一个无刷直流电机(BLDC)加谐波减速器或者行星减速器的组合。
这里要重点说一下关节。人形机器人最贵、最核心的硬件就是关节执行器。一个典型的关节模组长这样:无刷电机 + 力矩传感器 + 编码器 + 减速器 + 驱动电路,全部集成在一个圆柱形壳子里。典型产品如动易科技的 PhyArc 系列(摆线关节模组)。
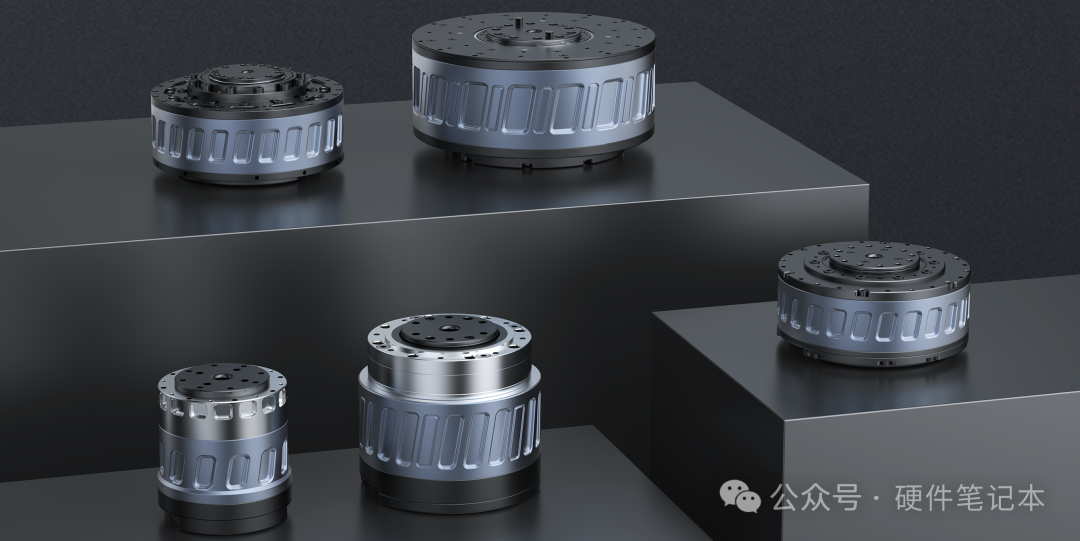
图源:世界机器人博览会
电机是无刷直流电机,扭矩大、效率高、寿命长。为什么不用有刷电机?因为电刷会磨损,机器人要长期运行,无刷是必须的。
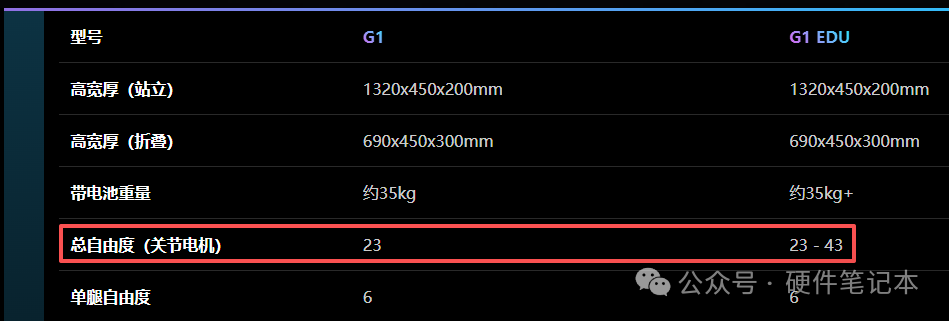
减速器有两种主流选择:谐波减速器(绿的谐波、HD哈默纳科)和行星减速器。谐波减速器精度高、传动比大,但贵;行星减速器便宜一些,抗冲击更好。宇树Unitree G1拥有23-43个自由度,其关节电机用的是行星减速器,为了兼顾成本,性能和集成化设计需求。
图源:宇树
编码器用来知道电机转了多少圈、当前角度是多少。现在主流是磁编码器或光编码器,新的还有电感编码器。高端关节分辨率能做到19位以上。
力矩传感器装在关节减速器的输出端或靠近负载侧,实时测量关节输出的扭矩。这个很重要,没有力矩反馈,机器人不知道用了多大力,抓个鸡蛋会捏碎,扶墙会自己摔倒。
驱动电路(也叫伺服驱动器)接收主控发来的指令,通过六步换相或FOC算法控制电机转动。高级的驱动器还直接做电流环、速度环、位置环的闭环控制。
所以一个关节,本质上就是一个高度集成的伺服系统。举个例子:宇树H1全身有18个自由度(不算手),每个自由度对应一个关节模组。

图源:宇树
躯干里藏着电源、主控和散热
拆开胸口,你会看到几样东西:
主控计算机:前面说了,通常是一块NVIDIA Jetson Orin或者x86板子。OrinX的算力在200 TOPS左右,用于跑AI模型、视觉处理、路径规划。
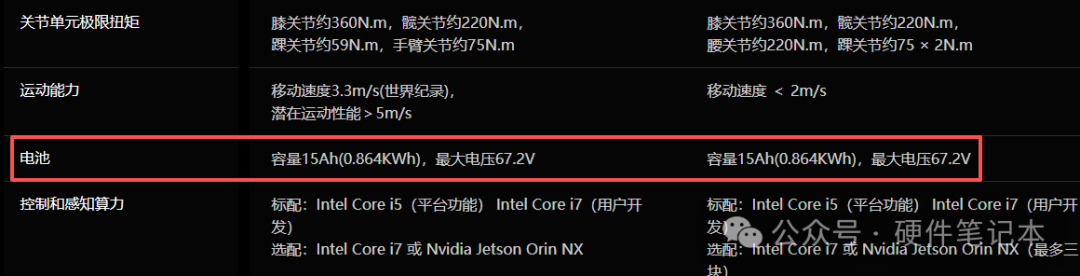
电池包:人形机器人一般用48V或72V的锂离子电池组,容量要看续航。宇树H1电池容量:15Ah(0.864kWh),能跑大概1.5小时。电池组带BMS,监控电压、温度、过流保护。
电源管理板:把电池电压转换成各种电压轨,比如给主控供12V/5V/3.3V,给电机供48V,给传感器供5V。电源设计要特别注意预留余量,因为电机启动瞬间电流极大,电压不能掉。
实时控制器:有时候主控来不及处理所有电机的高频闭环,会加一块FPGA或者高性能MCU(比如STM32H7系列)专门做底层电机同步控制。主控负责任务级的路径规划,决定机器人下一步要去哪个位置;实时控制器负责关节级的运动执行,告诉电机怎么转到位。
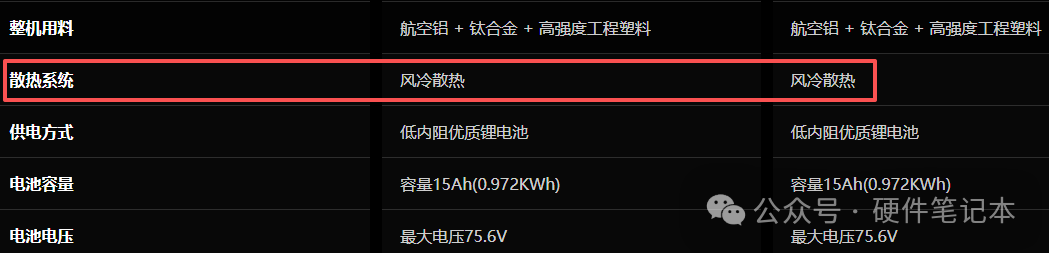
还要考虑散热。十几个电机同时转,主控芯片发烫,所以里面会有风冷(风扇加散热片),更高端的会用液冷。宇树的H2用了风冷方式。
图源:宇树
手臂和手,精度比力气更重要
手臂一般每侧5到7个自由度:肩关节3个(俯仰、滚转、偏航),肘关节1个,腕关节2到3个。每个关节依然是电机加减速器。
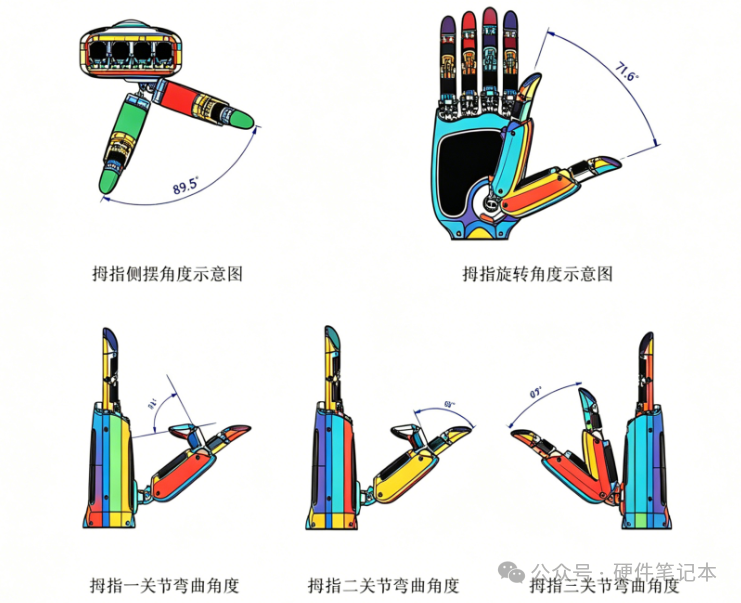
手部是最复杂的部分之一。人形机器人最简单的是两指夹爪,两个指头,能捏能放。高级的比如灵心手巧L20的手,有16个自由度,每个手指独立驱动。但注意,绝大多数灵巧手不是每个指节一个电机,而是通过腱绳(像自行车刹车线一样的钢缆)从手掌或手腕里的电机远程驱动指节。这样可以把电机集中放在前臂,手指做得很细很灵活。
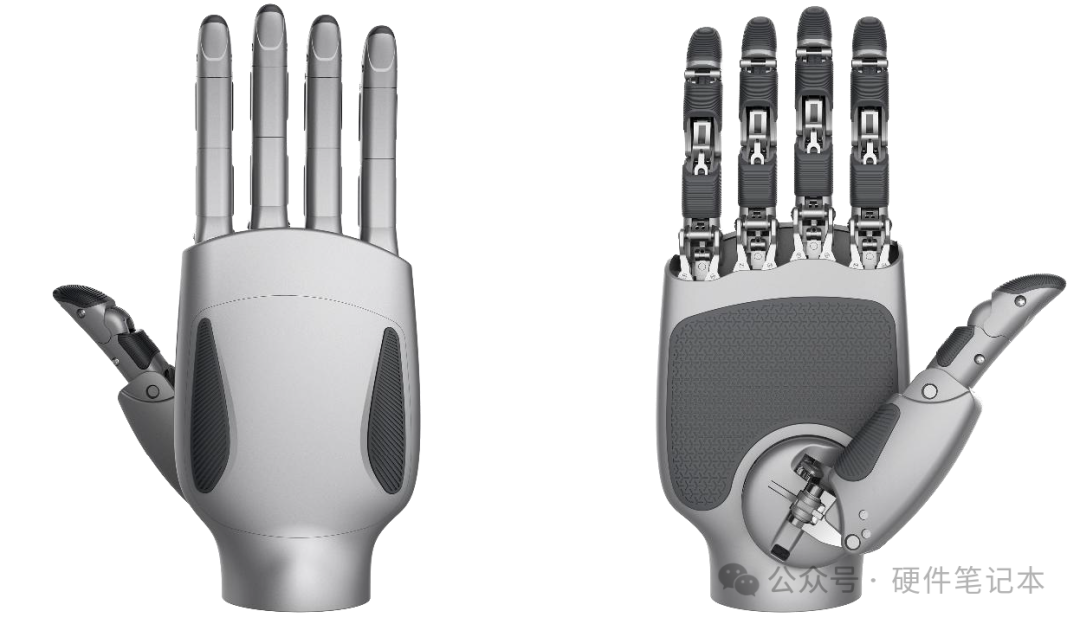
图源:灵心手巧
手指上会贴触觉传感器。抓物体时,传感器实时反馈接触力,控制器调整手指力度,防止打滑或捏碎。
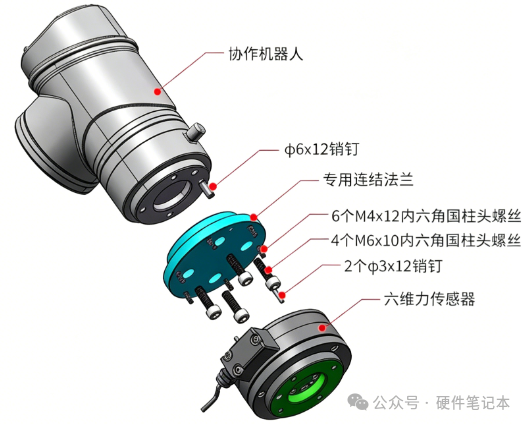
另外手腕处通常装一个六维力传感器。这个传感器能测出空间三个方向的力和三个方向的扭矩。为什么需要它?比如说机器人拧螺丝,手腕感觉到反作用力,就知道螺丝有没有拧到位。
腿部负责走路,比胳膊更吃控制
腿部结构每侧一般5到6个自由度:髋关节3个,膝关节1个,踝关节2个。髋关节的电机功率最大,因为要支撑全身重量。

图源:宇树
膝盖是单自由度的,但承受冲击最大。走路时膝盖承受的力是体重的2到3倍,所以膝关节的减速器和外壳都要强化。
脚踝有两个自由度(俯仰、滚转),保证脚底能完全贴合地面。脚底板会装脚底压力传感器,检测脚掌与地面的接触情况。机器人的平衡控制,很大一部分靠脚底压力数据和IMU数据融合来做。

图源:优必选
脚底板材质一般用铝合金或碳纤维,表面使用高性能改性TPU作为防滑层,增加摩擦力。
03
其它
内部走线
你可能会想,十多个关节、几十个传感器,线怎么走?不是每根线都单独拉到主控。
人形机器人内部用现场总线(CANopen或者EtherCAT)。每个关节模组内部集成一个EtherCAT从站芯片,所有关节通过一条网线串起来。主控发一条命令,所有关节几乎同时收到(微秒级延迟)。传感器也是一样,通过I2C或SPI转CAN的模块挂到总线上。
图源:优必选
电源线是另外走的粗线。48V电池出来,分到每个关节的驱动器。低压电源通过DC-DC转换器供给主控和传感器。
外壳材料
外壳不是简单为了好看。关键部位用铝合金(6061或7075)或者碳纤维,比如小腿、手臂骨架。非承重部位会用工程塑料或者镁合金,为了减重。人形机器人对重量极其敏感,要求尽量轻量化。
结尾
以上是对人形机器人的简单介绍,一台人形机器人,本质上就是一群高精度伺服关节 + 一个带传感器的主控系统 + 一套靠谱的电源和总线 + 一堆算法。硬件上最难的,不是单个电机多牛逼,而是几十个电机要毫秒级同步动作,同时维持整机动平衡。这需要硬件、底层驱动、上层算法三层完美配合。
这两年国产机器人大爆发,供应链已经比较成熟。真正拉开差距的地方在于:整机控制算法、关节散热设计、成本控制**这些环节**。
好了,今天就写到这儿。以上是我作为一个硬件工程师的观察,肯定有没讲到或者讲不准确的地方。如果你也是搞硬件的,或者就在机器人行业里搬砖,欢迎在评论区聊聊。
参考内容:宇树科技、智元机器人、众擎机器人、优必选、灵心手巧








评论区
登录后即可参与讨论
立即登录