地平线正式发布并开源HoloMotion-1,这是地平线机器人实验室面向人形机器人全身控制打造的4亿参数级机器人小脑大模型。相比以往常见的百万级、千万级机器人控制模型,HoloMotion-1将机器人“小脑”的模型规模提升到新的量级,并在端侧实现约300FPS实时推理,让大模型能力真正进入机器人运动控制闭环。通过本次开源,地平线希望降低人形机器人全身控制的研发门槛,帮助开发者更高效地构建、复现和部署高动态全身运动能力,推动机器人“小脑”从实验室算法验证走向真实机器人规模化应用。
人形机器人要完成高动态全身动作,远不只是“动起来”。它需要在几十个关节之间保持协调,理解并跟随复杂人体动作参考,应对高速姿态变化,并在连续时序中保持动作稳定、自然和一致。传统小规模控制模型往往更适合有限动作集或特定任务,而HoloMotion-1依托更大的模型容量,面向更丰富的动作分布和更长时序的运动连续性,建模更复杂的身体协同关系。
但机器人“小脑”不能只大,还必须足够快。HoloMotion-1结合MoE稀疏激活与KV-cache推理机制,在保持4亿参数级模型容量的同时降低单步推理开销,实现端侧约300FPS的实时运行能力,显著高于常见50Hz控制频率要求。这意味着机器人控制大模型不再只是离线训练或仿真验证中的能力展示,而可以真正进入高频、低延迟的真实机器人控制链路。
• 开源模型代码库:
https://github.com/HorizonRobotics/HoloMotion
• 项目主页:
https://horizonrobotics.github.io/robot\_lab/holomotion
• 技术报告:
https://arxiv.org/abs/2605.15336
• 开源模型:
https://huggingface.co/HorizonRobotics/HoloMotion\_models
• Docker环境**:**
https://hub.docker.com/r/horizonrobotics/holomotion
4亿参数级小脑大模型:**面向全身控制的MoE-Transformer架构**
在人形机器人控制中,模型规模长期受到实时性和部署成本限制。传统控制策略往往依赖较小模型或任务特化策略,虽然易于部署,但在复杂动作、多来源数据和跨场景泛化方面存在明显瓶颈。
HoloMotion-1探索了一条新的路线:在保持端侧实时推理能力的前提下,将人形机器人运动控制策略扩展到4亿参数级。在模型架构上,HoloMotion-1采用MoE-Transformer policy。系统以参考动作和机器人本体观测为输入,通过reference-conditioned router进行稀疏专家路由,再由Transformer主干网络和action head输出机器人全身控制动作。
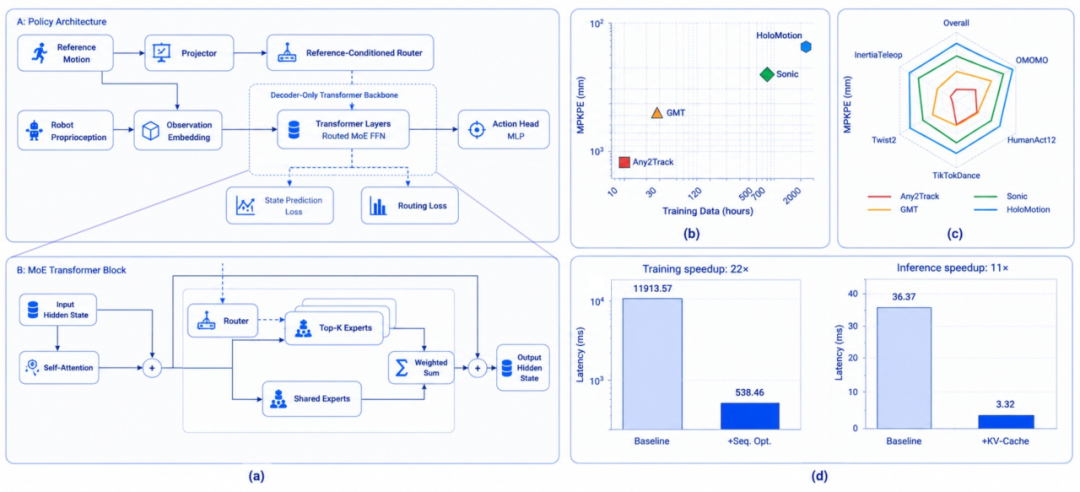
图1:HoloMotion-1模型架构与评测结果。(a) 模型架构;(b)训练数据量与跟踪误差;(c)多数据集评测指标;(d)加速比例。
这一设计使模型具备更强的动作表达能力,同时通过稀疏激活控制实际推理开销。结合序列级训练优化与KV-cache推理优化,HoloMotion-1在报告设置下将推理延迟降低至3.32ms,对应约300FPS的端侧实时推理能力,可满足真实机器人高频控制需求。同时,HoloMotion-1在多项评测中展现出领先的整体表现。
开箱即用:覆盖数据、训练、评测
与部署的完整开源流程
本次HoloMotion-1开源的价值,不仅在于模型本身,也在于同步开放了一套完整的人形机器人全身控制研发流程。HoloMotion提供从环境配置到真实机器人部署的端到端工具链,覆盖全流程。
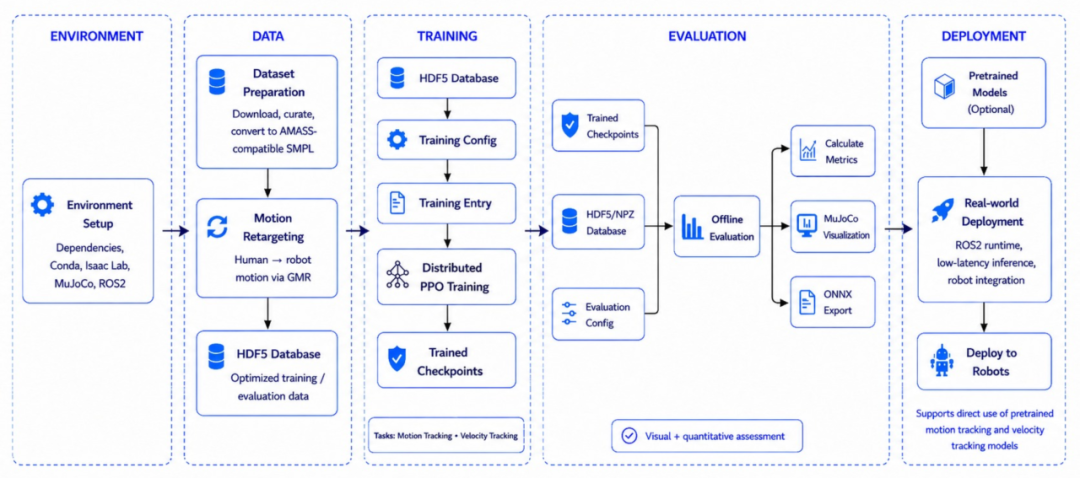
图2:HoloMotion系统模块
开发者既可以基于自定义动作数据重新训练模型,也可以直接使用开源的预训练motion tracking和velocity tracking模型进行部署验证。
-
对于研究者,HoloMotion提供了可复现的训练、评测与可视化流程;
-
对于开发者,HoloMotion提供了从模型导出到真实机器人部署的工程链路;
-
对于机器人团队,HoloMotion提供了快速验证复杂动作、不同平台和不同任务的基础能力。
这一套“开箱即用”的开源体系,有助于减少重复工程建设,让社区能够更快聚焦于模型架构、数据规模、动作泛化和真实部署等核心问题。
Imitate Any Pose:从互联网视频、动捕数据到真实机器人
HoloMotion-1首先建立的能力是:Imitate Any Pose,即机器人运控领域中的通用motion tracking任务。也就是说,机器人不仅要会走路、站立或执行少量预设动作,还要能够从大规模开放动作数据中学习复杂全身姿态,并迁移到真实机器人上稳定执行。
HoloMotion-1使用多来源动作数据进行训练,包括互联网视频恢复动作、光学动捕数据、 VR遥操作数据和惯性动捕遥操作数据。通过统一的数据处理和动作重定向流程,系统将人类动作转化为适合机器人学习和控制的训练数据。
在真实机器人实验中,HoloMotion-1展示了多类复杂动作的零样本迁移能力:
-
高动态舞蹈动作,来自互联网视频数据;
-
爬行、坐下、高踢腿等接触丰富动作,来自高精度光学动捕数据;
-
健身等动作,来自低成本 VR 遥设备;
-
搬箱子等人机交互任务,来自惯性动捕设备。

图3:真实机器人零样本迁移效果
这些动作覆盖了人形机器人全身控制中的多个关键难点,包括大幅度肢体运动、低姿态动作、接触丰富动作、动态平衡动作以及实时遥操作跟踪。HoloMotion-1的真实机器人表现表明,大规模动作数据与大容量控制模型结合,可以为人形机器人提供更通用的运动技能基础。
从任意姿态泛化
到任意指令、地形和本体
HoloMotion-1是HoloMotion技术路线的第一阶段,重点解决模仿任意姿态 (Imitate Any Pose) ,即从视频、MoCap和遥操作数据中学习复杂全身动作。HoloMotion-1已经围绕这一能力建立了完整模型、数据和部署流程。
面向未来,HoloMotion将继续向三个方向演进:
-
遵循任意指令 (Follow Any Command) :进一步支持VR设备、遥控器、语言指令等多模态命令输入,让机器人从“模仿动作”走向“根据指令生成和执行动作”。
-
跨越任意地形 (Move on Any Terrain) :结合视觉、激光雷达、相机和世界模型,让机器人能够在楼梯、坡道、复杂室内外环境中稳定移动。
-
控制任意本体 (Control Any Embodiment) :通过body encoder和body embedding支持不同机器人本体,使同一套运动控制框架能够适配不同尺寸、自由度和结构的人形机器人。
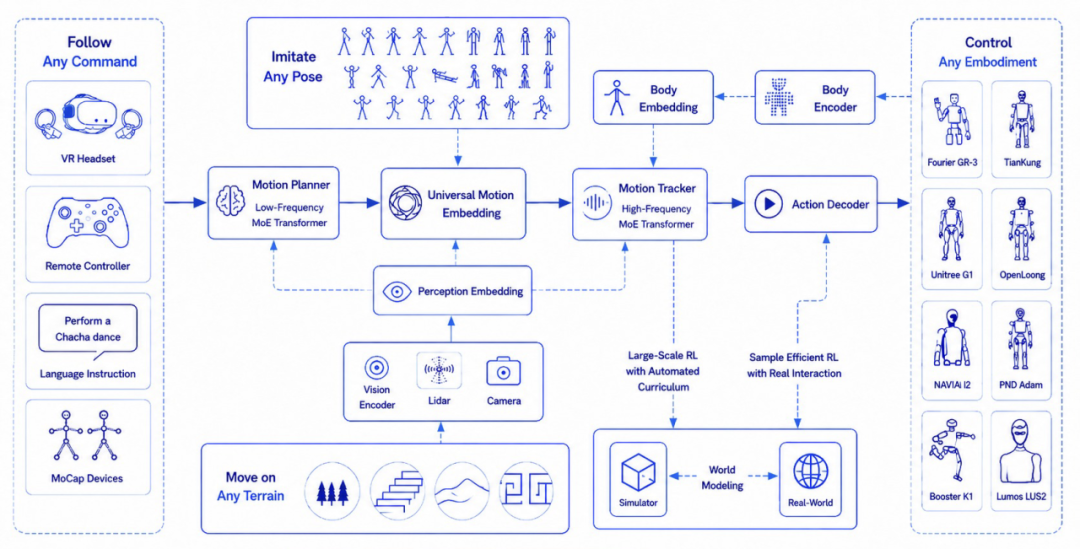
图4:HoloMotion Roadmap
从大脑到小脑
共建具身智能全栈开源生态
具身智能走向通用场景,既需要机器人“大脑”完成感知、理解、规划与决策,也需要“小脑”将任务意图和动作目标转化为稳定、实时、可执行的全身控制信号。此前,地平线已开源HoloBrain VLA基座模型及RoboOrchard全栈基础设施,面向具身智能任务提供从感知到动作的统一模型框架。本次HoloMotion-1发布,进一步补齐人形机器人高频全身运动控制能力,使地平线具身智能开源体系从“机器人认知与操作”延展到“机器人全身运动控制”
与此同时,面向真实机器人部署,端侧算力平台同样是具身智能落地的关键环节。地瓜机器人RDK S100大小脑一体化计算平台,提供80~128 TOPS算力,可作为人形机器人、仿生机器人等场景中模型部署、算法验证与系统集成的重要硬件底座。HoloMotion很快将释放面向RDK S100的部署适配、性能优化与示例文档,使开发者获得更丰富且更高性价比的部署和落地选择。
通过开放覆盖数据处理、动作重定向、模型训练、离线评测、端侧部署和硬件适配的完整流程,HoloMotion-1希望降低人形机器人全身控制研发门槛,加速机器人“小脑大模型”的技术迭代。未来,地平线将继续携手社区,围绕通用机器人所需的大脑、小脑、端侧算力平台和全栈基础设施持续演进,推动具身智能技术走向真实世界应用。












评论区
登录后即可参与讨论
立即登录