工程名称:【立创开发板】追问•具身AI六轴机械臂
工程作者:少不入川
前言
这是一个“你没见过”的具身AI六轴机械臂!
为啥说“没见过”?
它的设计形式很特别——整体几乎是用开发板“堆砌”而成!
——其以立创开发板生态为核心+ 自己画的扩展板+ 机械结构+ 驱动电路,集成了一套完整的系统!
看起来……又简单又复杂啊……
接下来,咱就瞅瞅它的具体功能,再分析一下设计方案!PS:文末还会附上开源网址,想要“学习”or“复刻”的友友,可以前往深入了解!
*0***1
功能&亮点
”
能通过3D手势、毫米波雷达、手指动作、声音、图像、触摸屏,控制机械臂:
-
AI对话+意图识别:爱山派通过Wi-Fi接入云端大模型API(如小龙虾/通义千问/文心一言),转化为机械臂动作序列,实现语音对话/控制机械臂。
-
视觉识别:庐山派K230搭载CanMV固件,运行轻量级YOLO模型,实现人脸/物体检测,能认出你的模样(是否戴眼镜,拿着什么)
-
手指动作:左右上下挥舞手臂,机械臂会跟着移动
-
毫米波雷达:当你靠近机械臂,机械臂会跟着你的方向移动,这个功能后续或许可以实现你回家,机械臂帮你脱外套拿包,倒茶的功能?哈哈
-
触摸屏“控制机械臂”:通过屏幕,调整电机角度,复位或精细控制机械臂角度
-
交互输出类型:激光投影、水晶大灯、RGB、喇叭、屏幕、步进电机实现交互
-
最大伸展1065CM
演示图:
<< 左右滑动查看下一张图片 >>
接下来,咱们瞅瞅它的设计方案!
*0***2
硬件设计方案
”
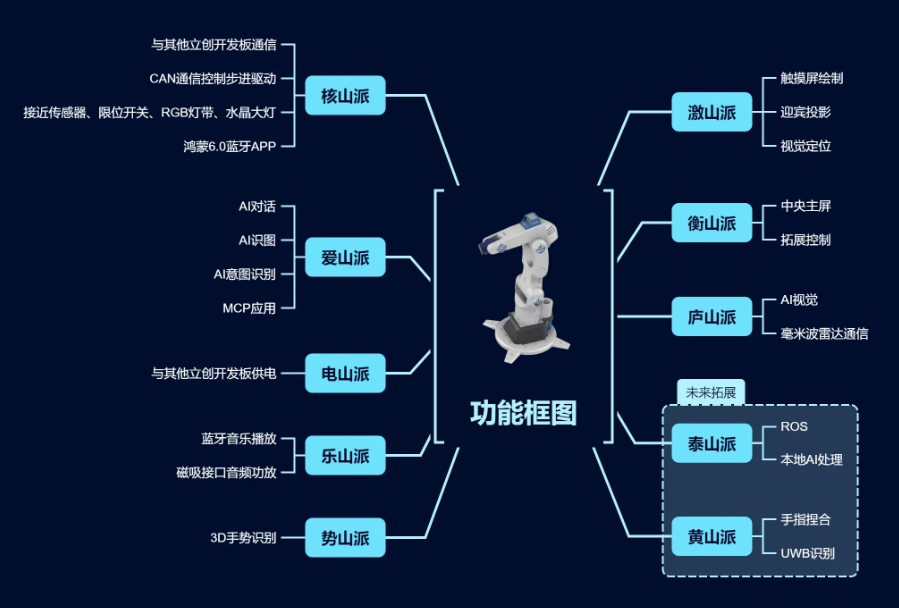
本项目共计20块板子,一口气放出来,肯定是很乱的,为了方便大家理解,我们根据功能结构,将20组PCB,进行6大板块的划分↓
整个系统以核山派为中央控制器,前3大板块分为三大终端:
-
采集/感知终端(基于势山派/庐山派/乐山派等):负责手势、视觉、声音等感知输入
-
控制终端(基于核山派 + 6路步进驱动等):负责数据处理和运动控制
-
显示终端(基于爱山派/衡山派等):负责人机交互界面
后3大板块为:供电、辅助接口、待开发。
每个板子负责一个功能模块,各板之间通过CAN总线通信,再由核山派完成"感知→决策→执行"的数据闭环。
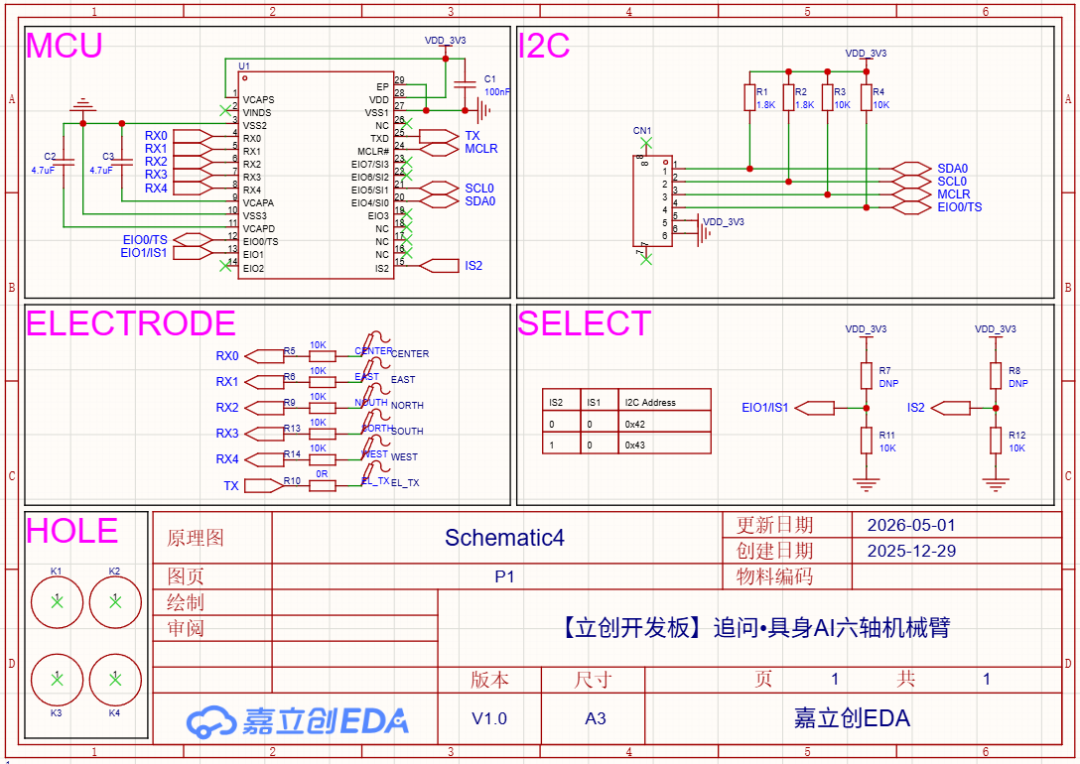
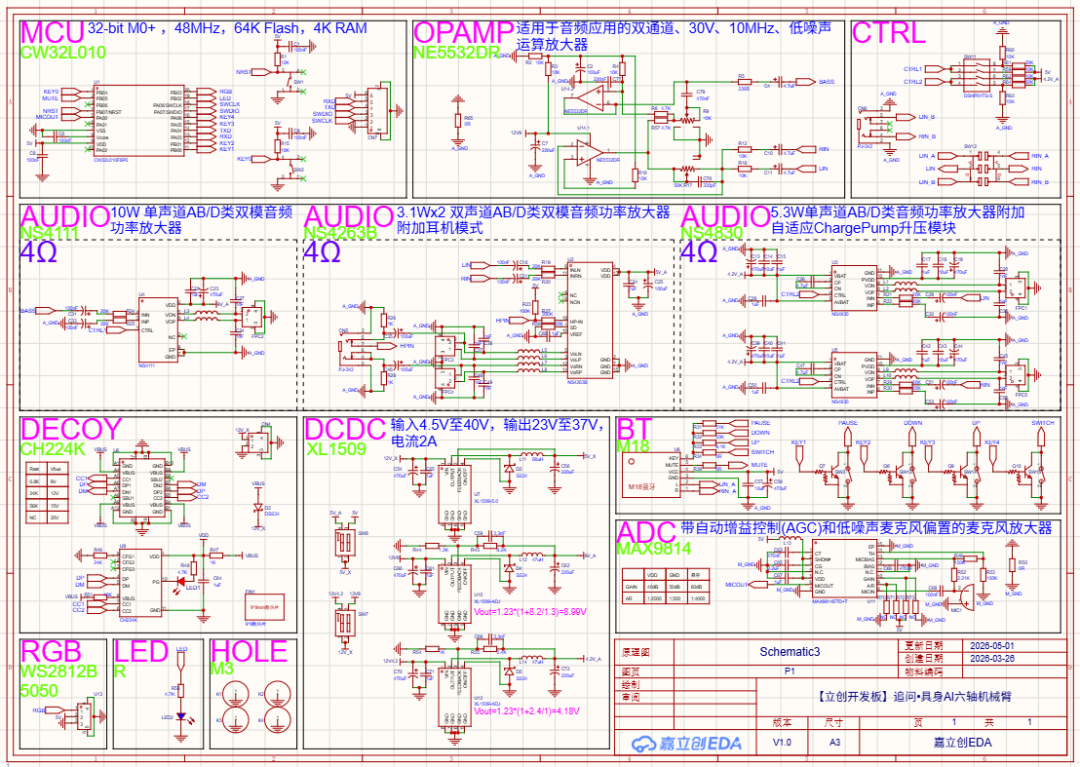
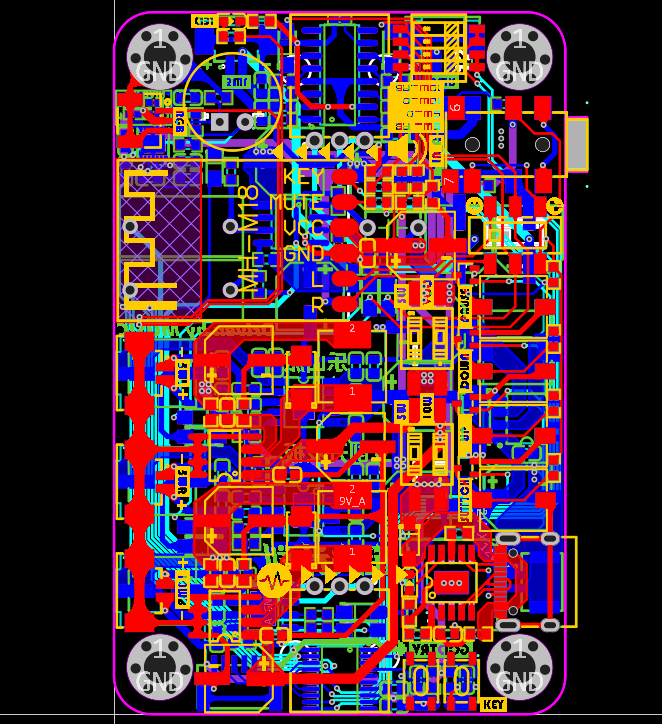
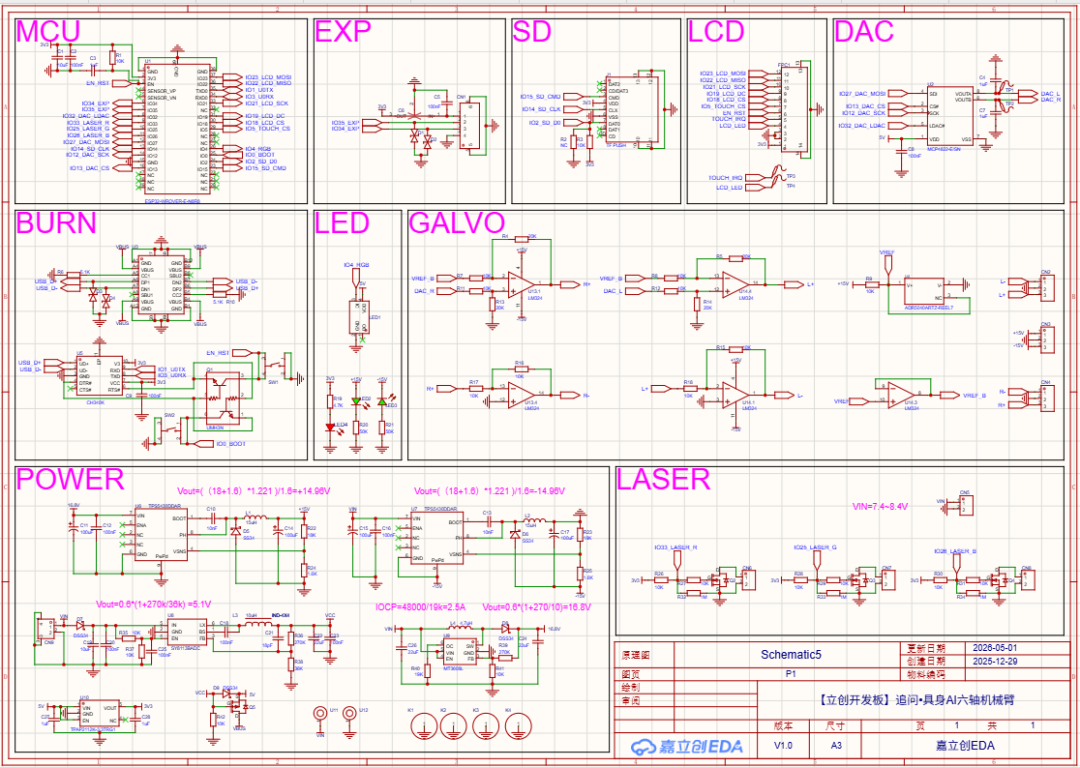
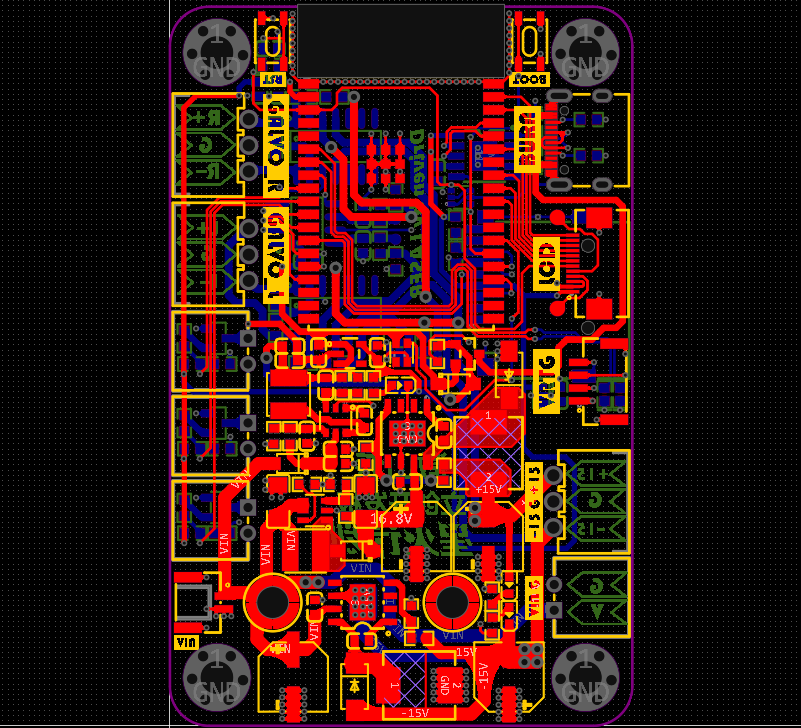
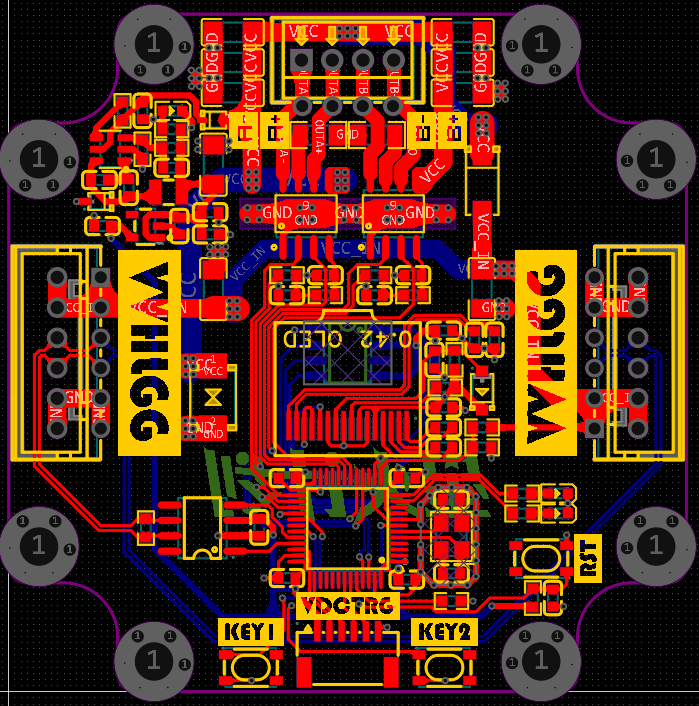
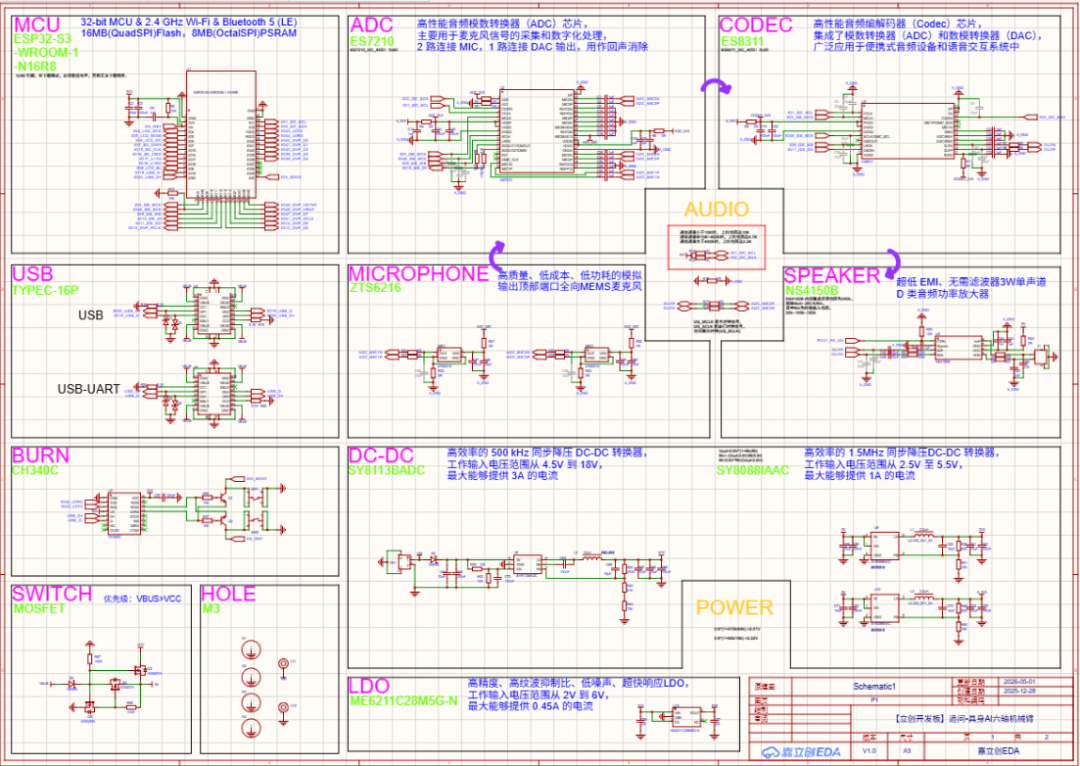
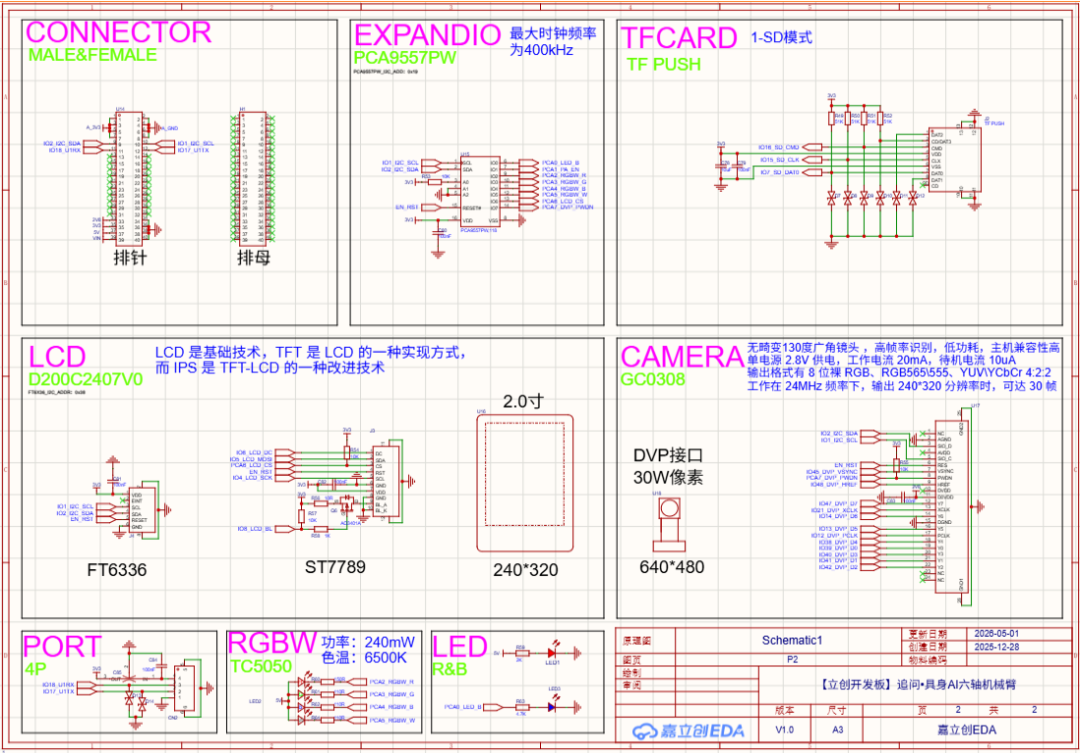
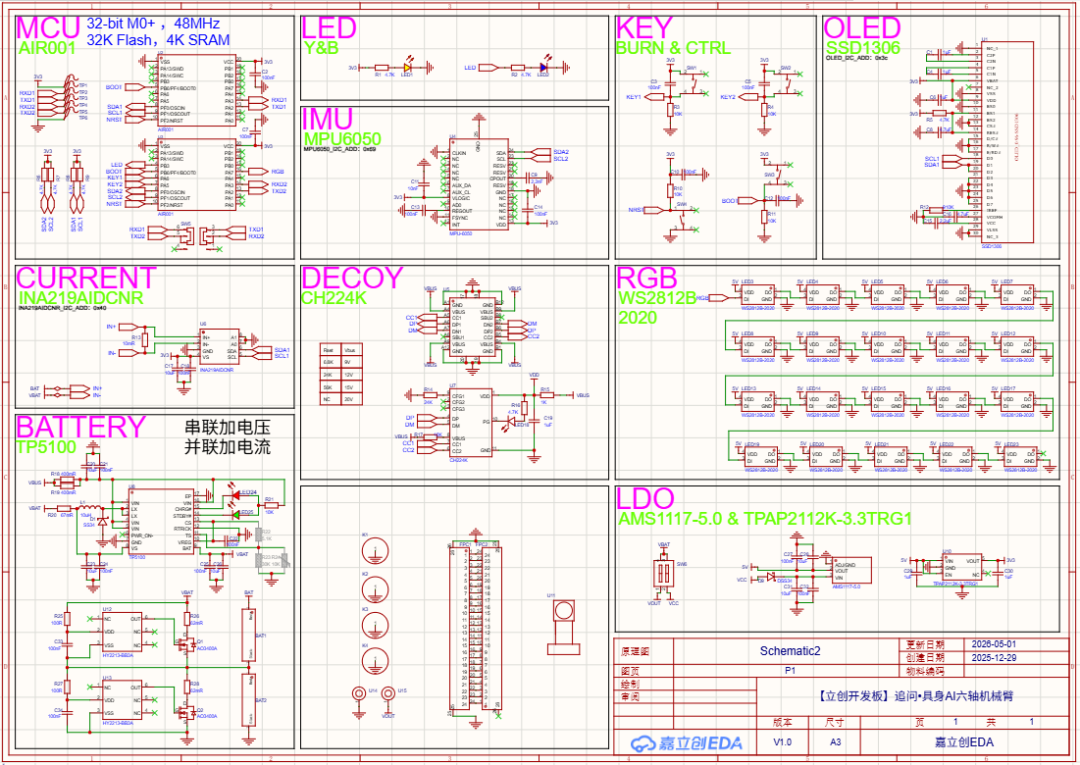
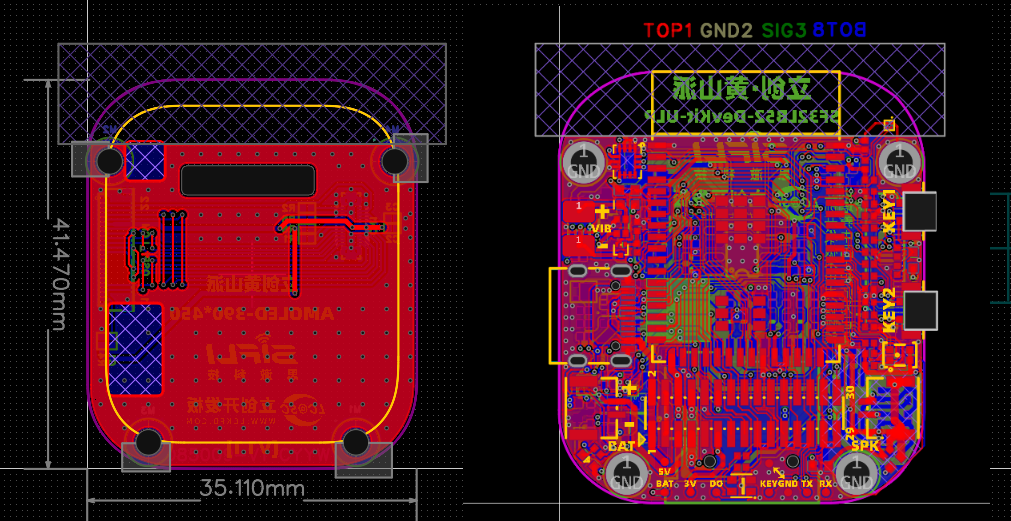
下面是电路设计图&每块板子用途的分享↓
01
采集/感知终端(4块)
所有小图都可以点击后放大查看!
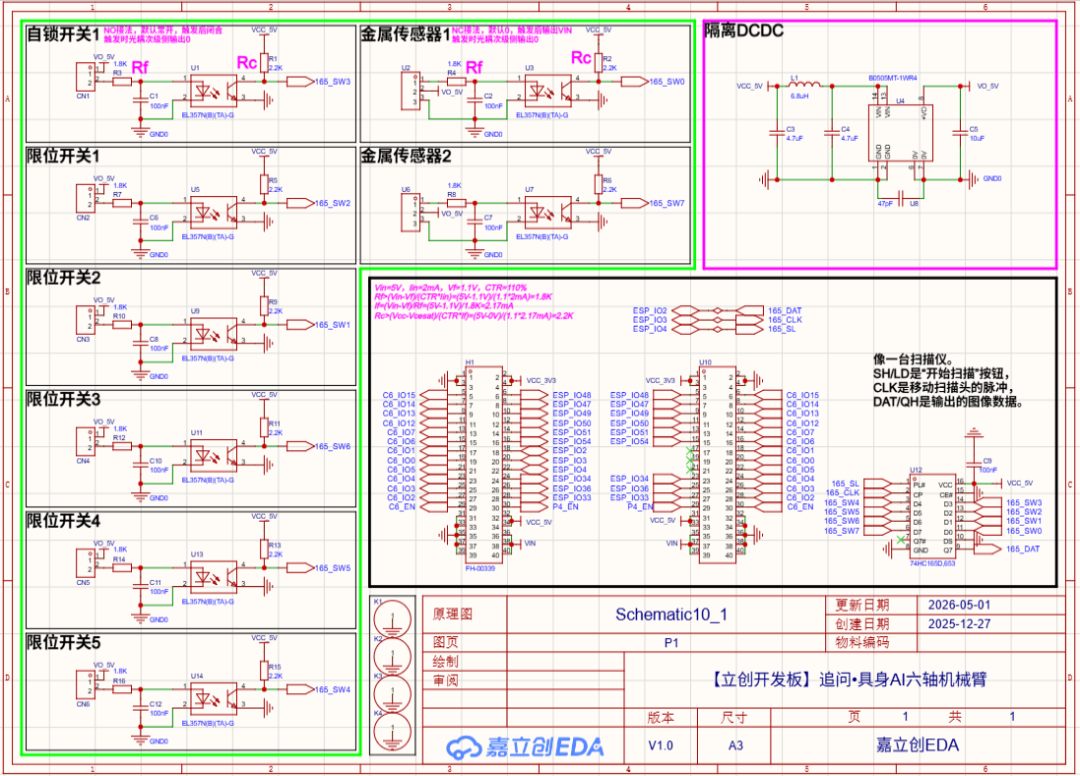
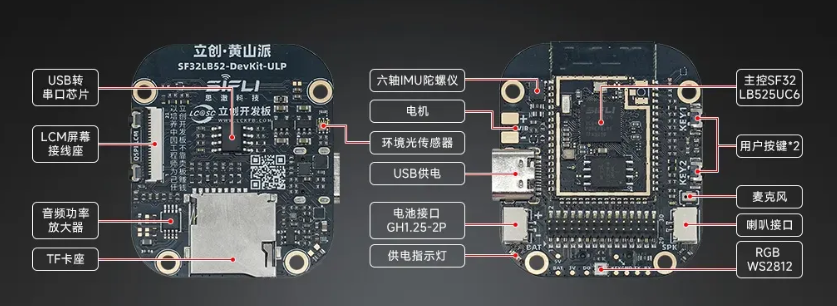
1.1 势山派
隔空手势传感器(毫米波雷达方案)。用户在空中做手势就能控制机械臂,是"多模态交互"的重要输入通道。
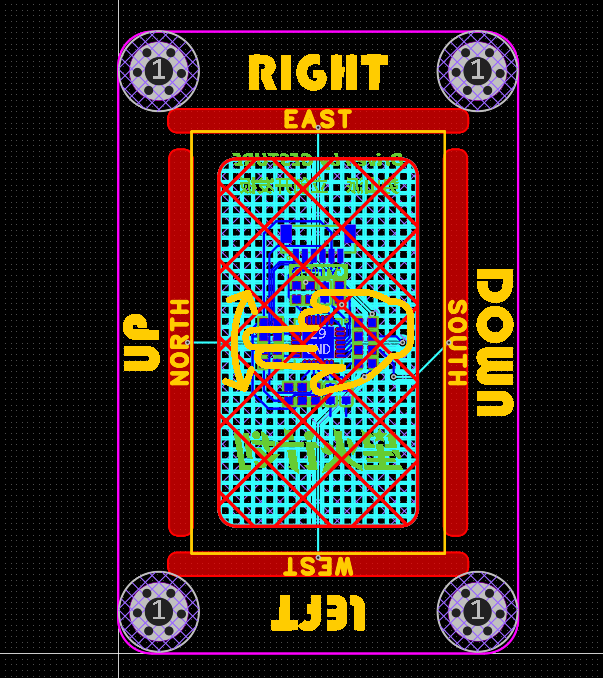
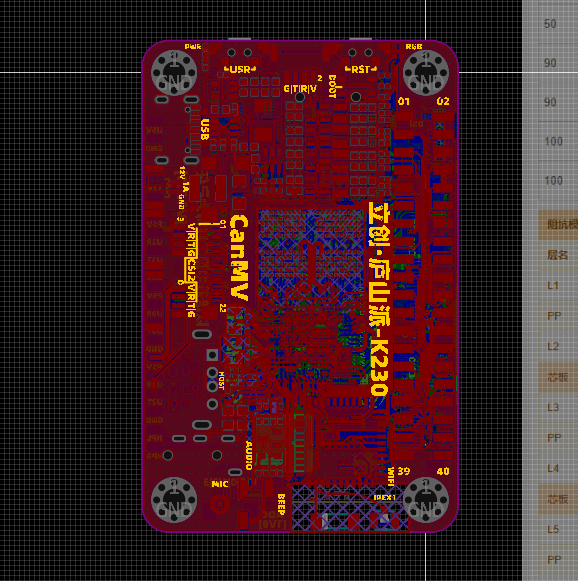
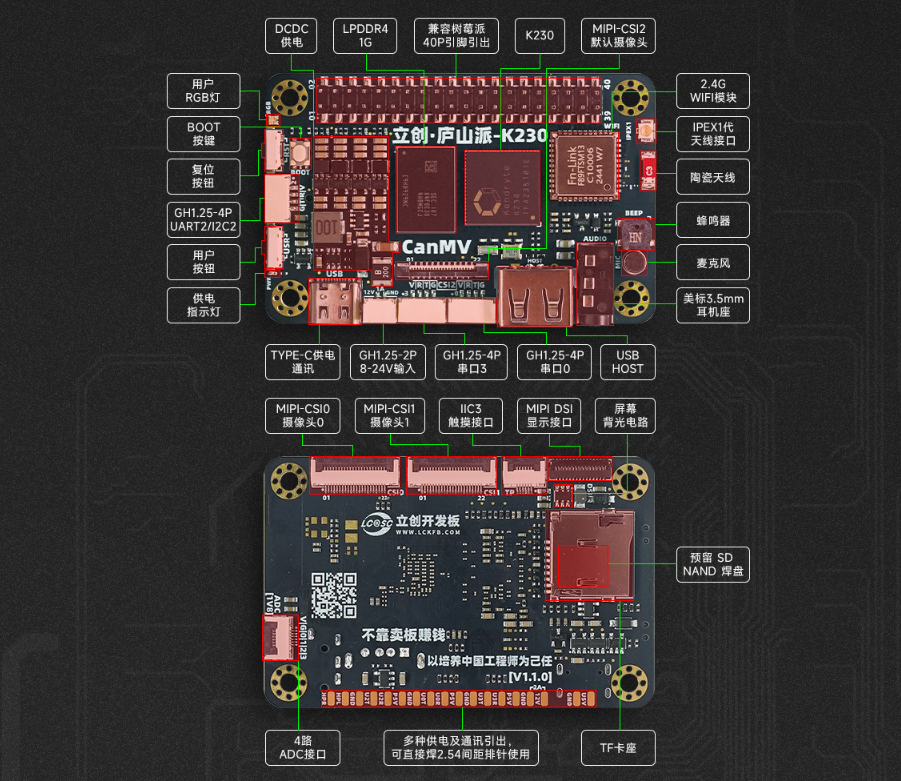
1.2 庐山派(官方)
K230 CanMV开发板,负责摄像头视觉采集。做AI图像识别、手势识别等视觉相关任务,是机械臂的"眼睛"。
1.3 乐山派
喇叭板,机械臂的"嘴巴"。负责语音播报、对话回应等声音输出功能,让机械臂能和人"说话"
1.4 激山派
矢量激光投影仪,可作为状态指示或交互输出。灵感来自智能电动汽车的灯光语言,给机械臂增加视觉表达力。
02
控制终端(7块)
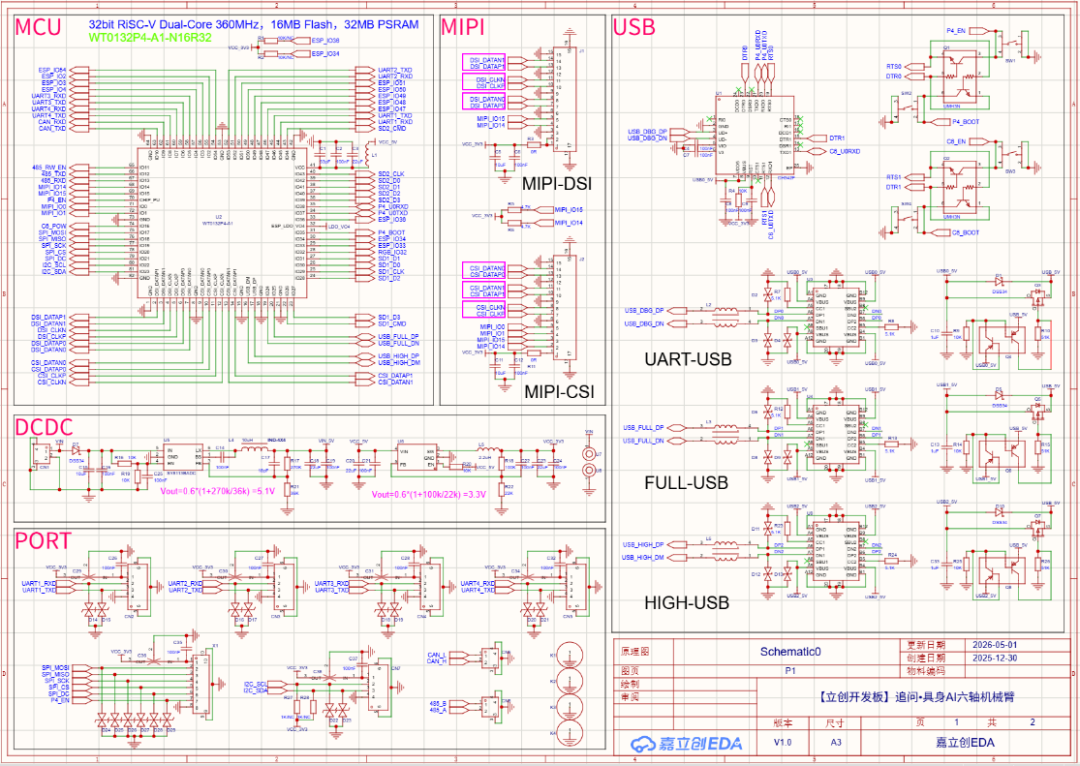
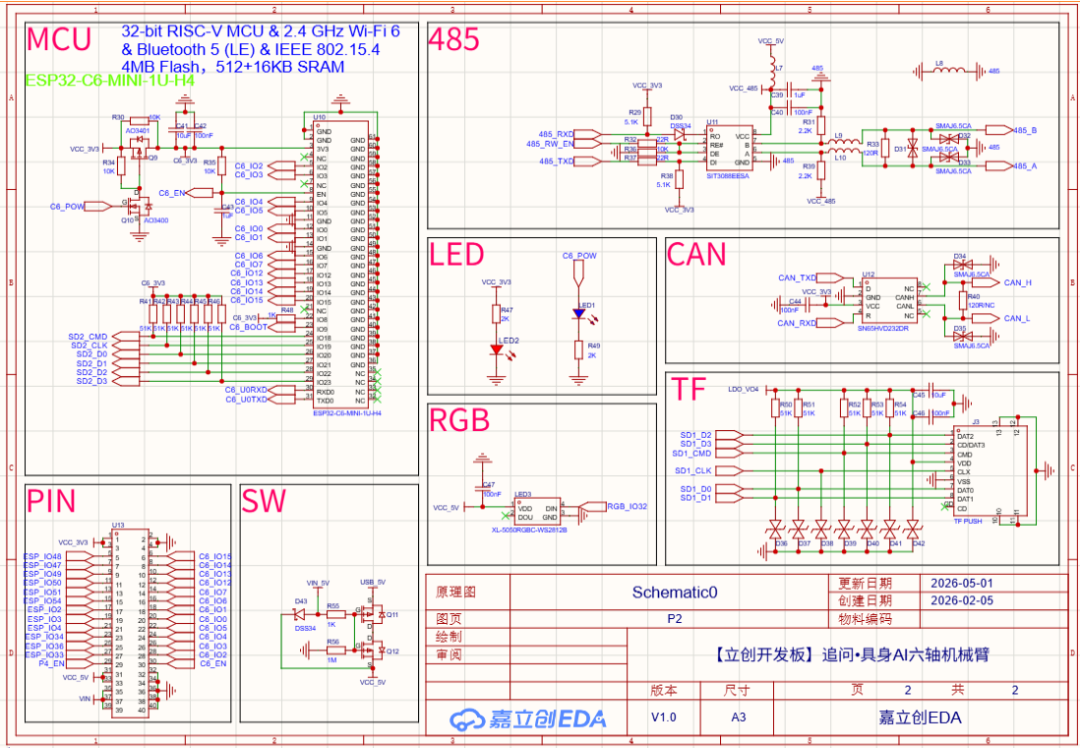
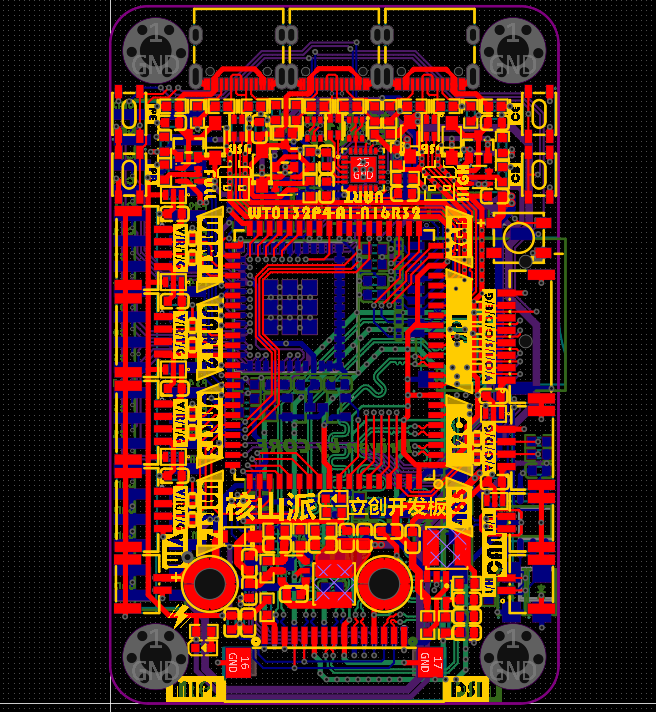
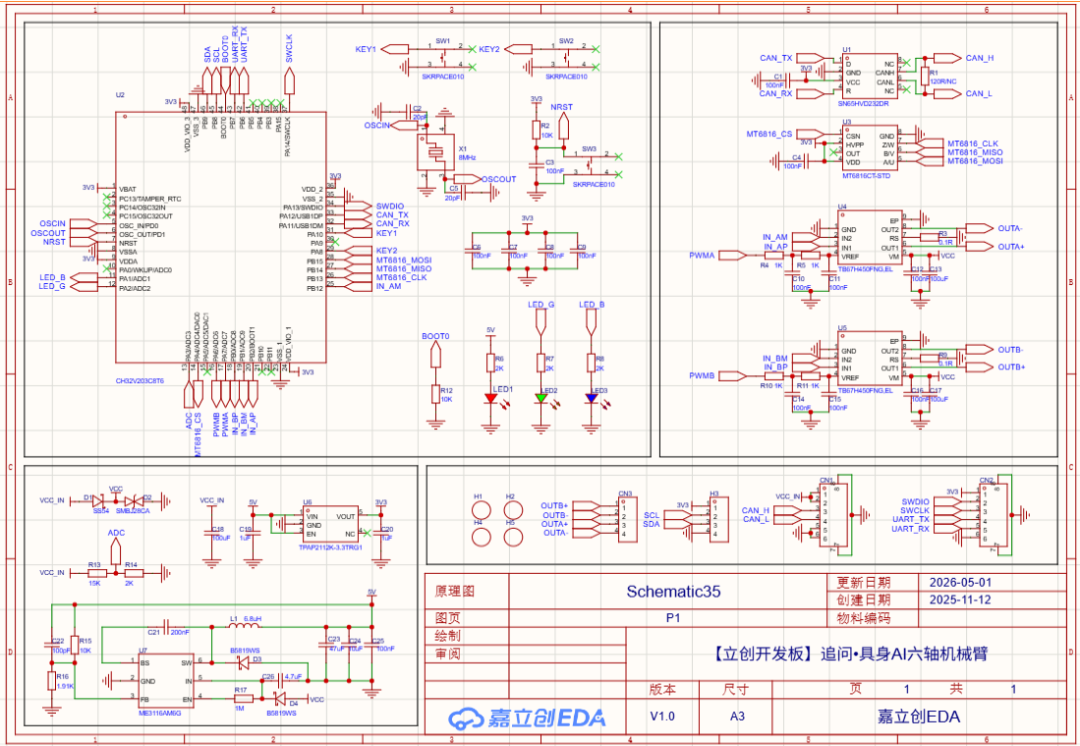
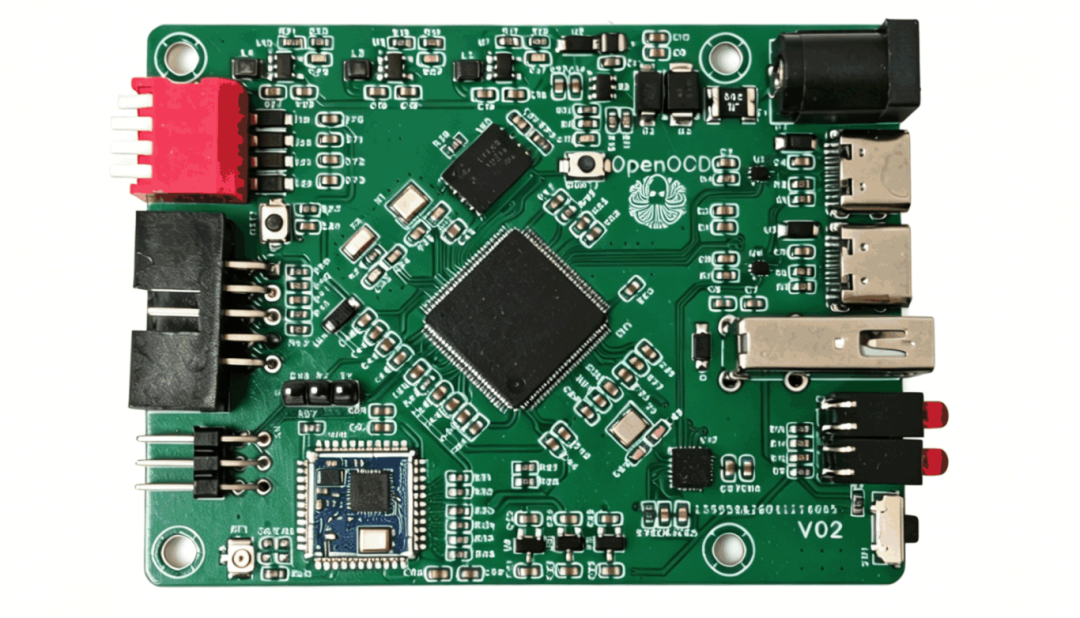
2.1 核山派
通过CAN总线串级连接所有步进电机驱动板(1个35驱动+2个42驱动+3个57驱动,共6个关节),接收各感知模块的数据,做决策后下发控制指令
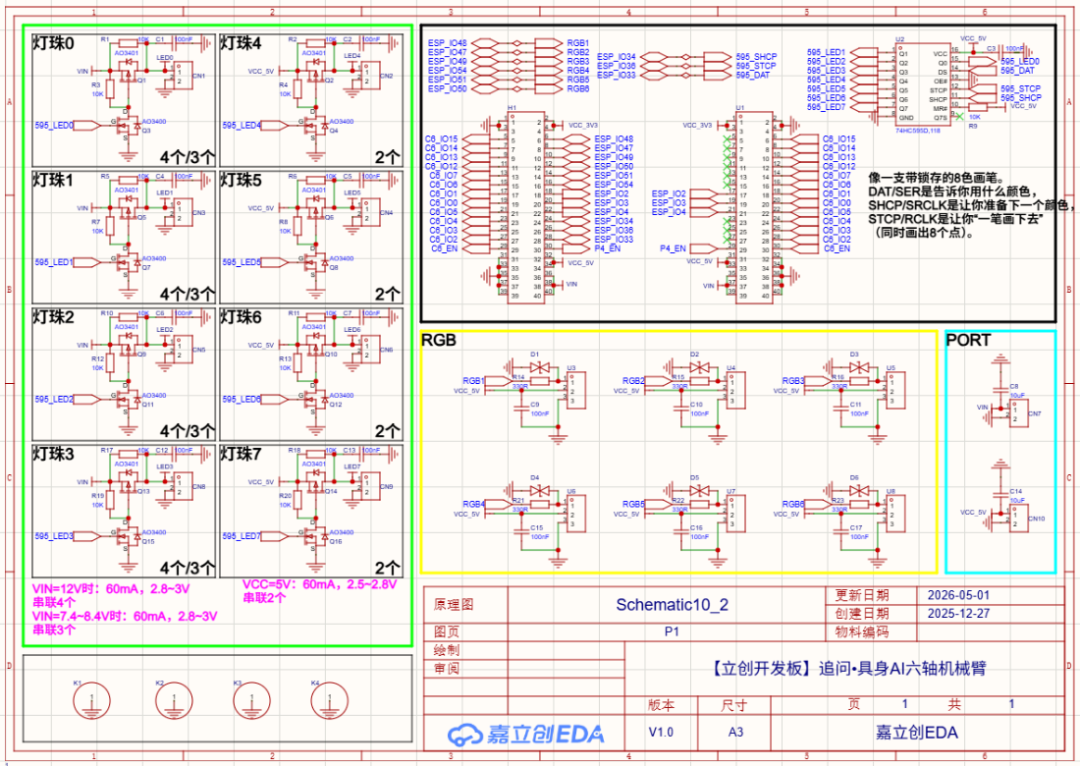
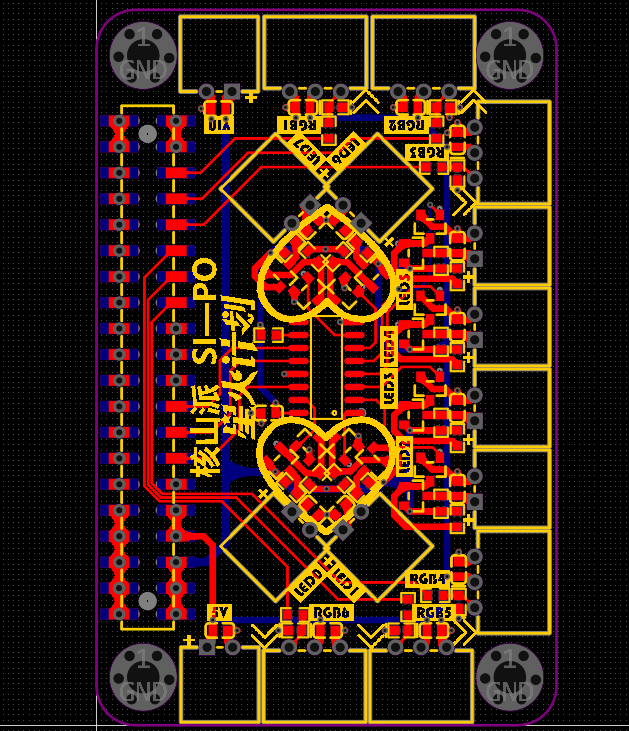
2.2 核山派:并入串出
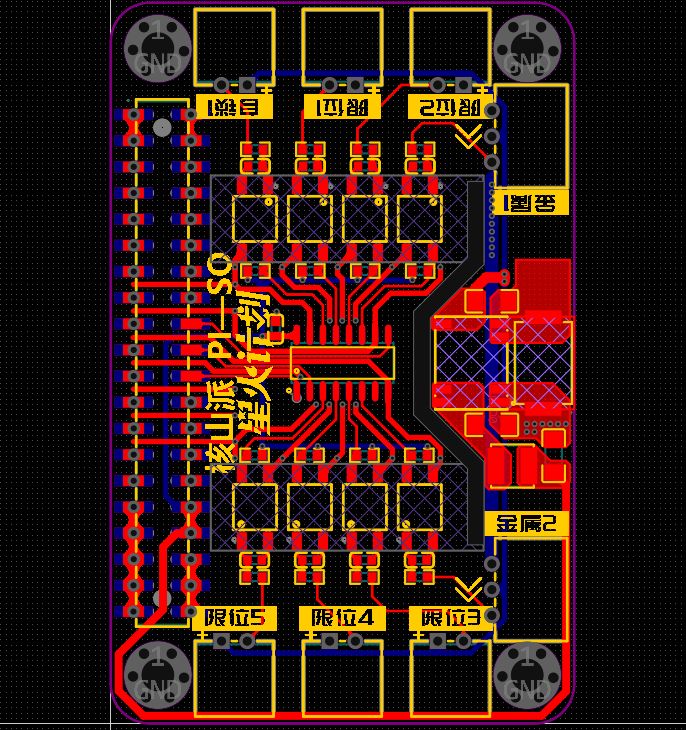
2.3 核山派:串入并出
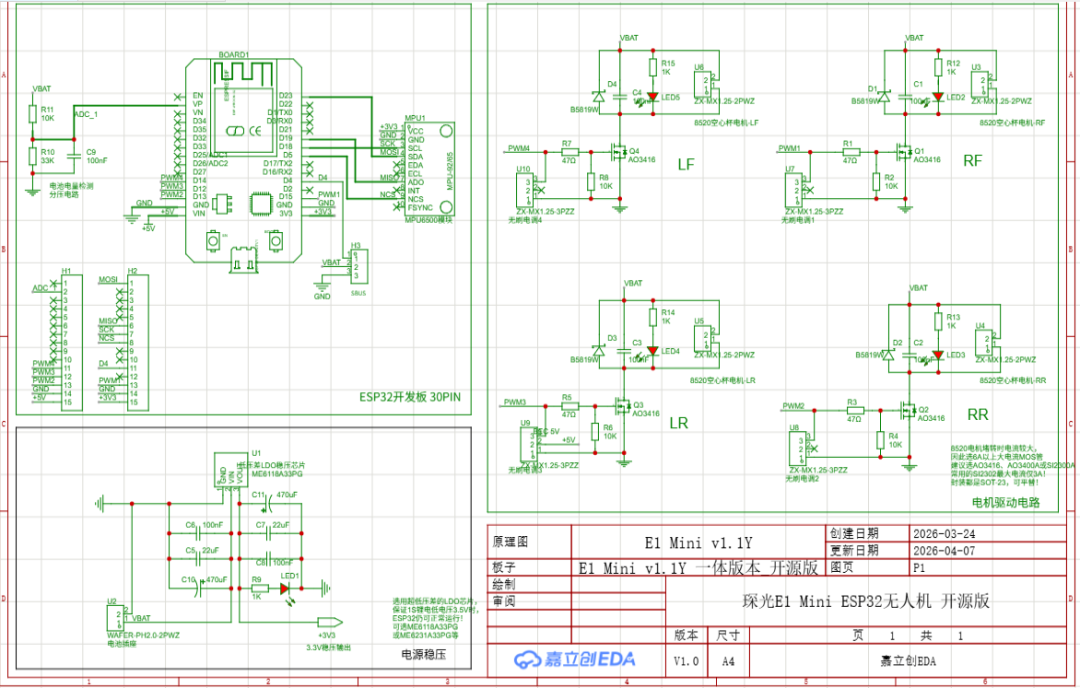
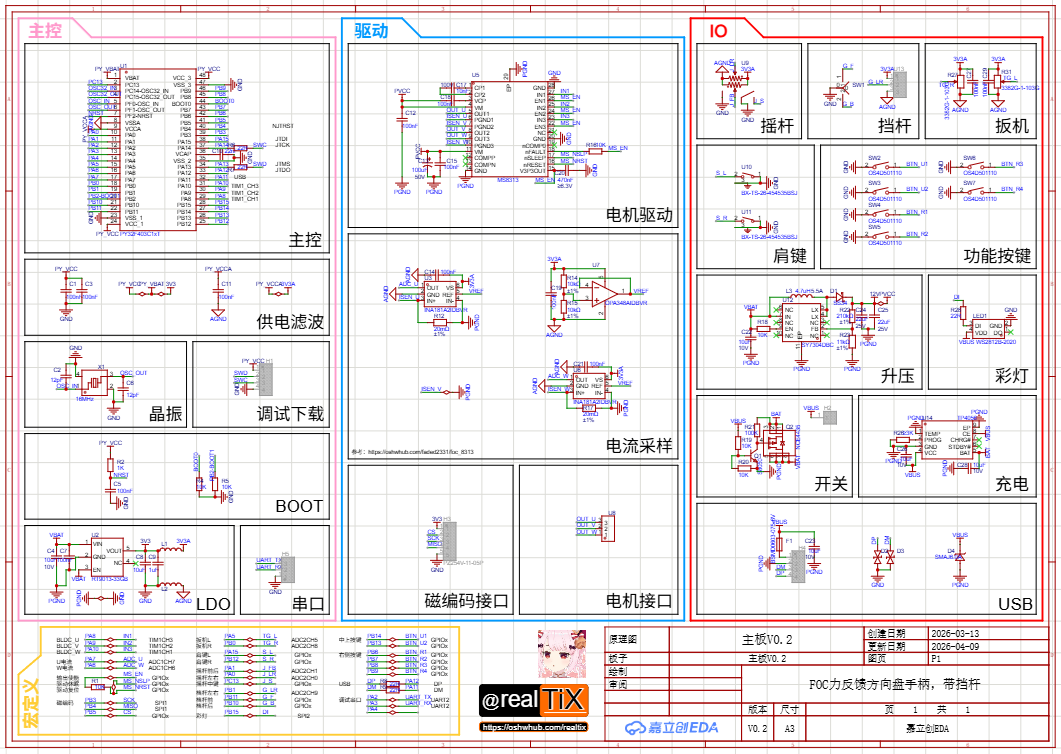
2.4 35闭环步进驱动
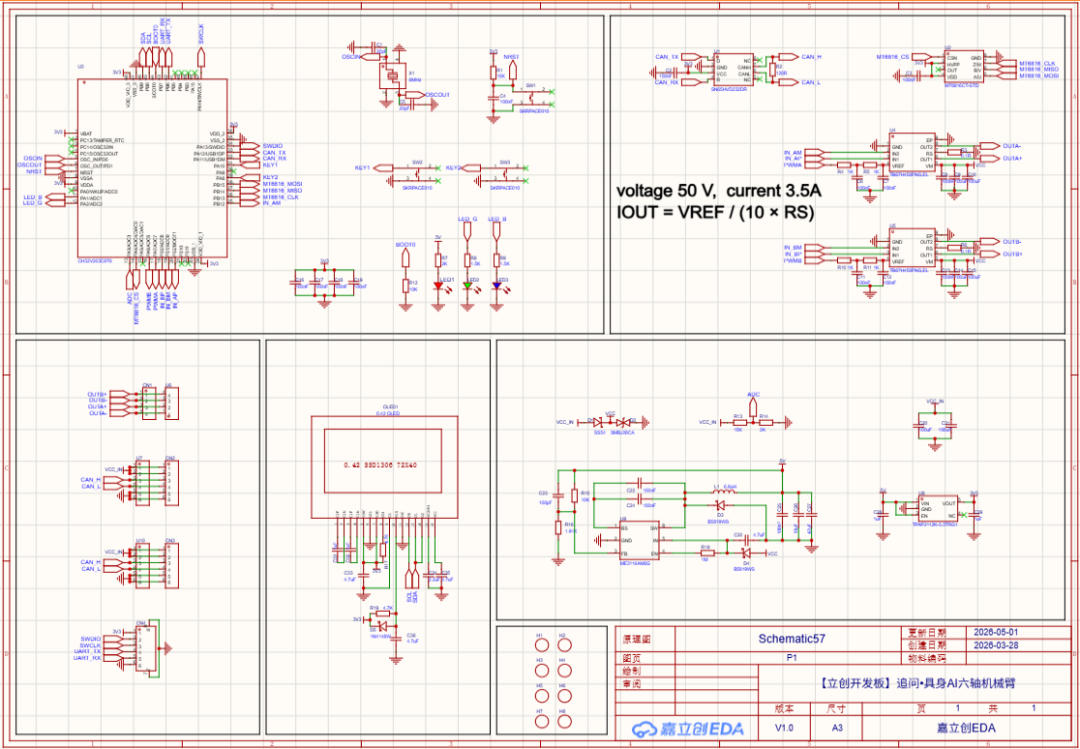
本项目设计了三块专用驱动板,分别驱动不同规格的步进电机。采用横波斩流方案+FOC算法,实现力矩/速度/位置三环闭环控制,PID可调。核山派通过CAN总线串级连接这6个驱动器,控制机械臂6个关节的运动
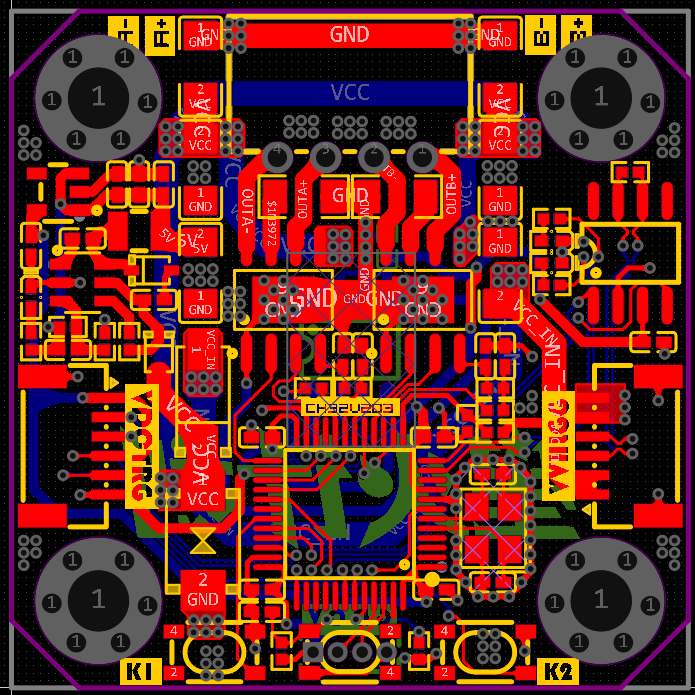
2.5 42闭环步进驱动
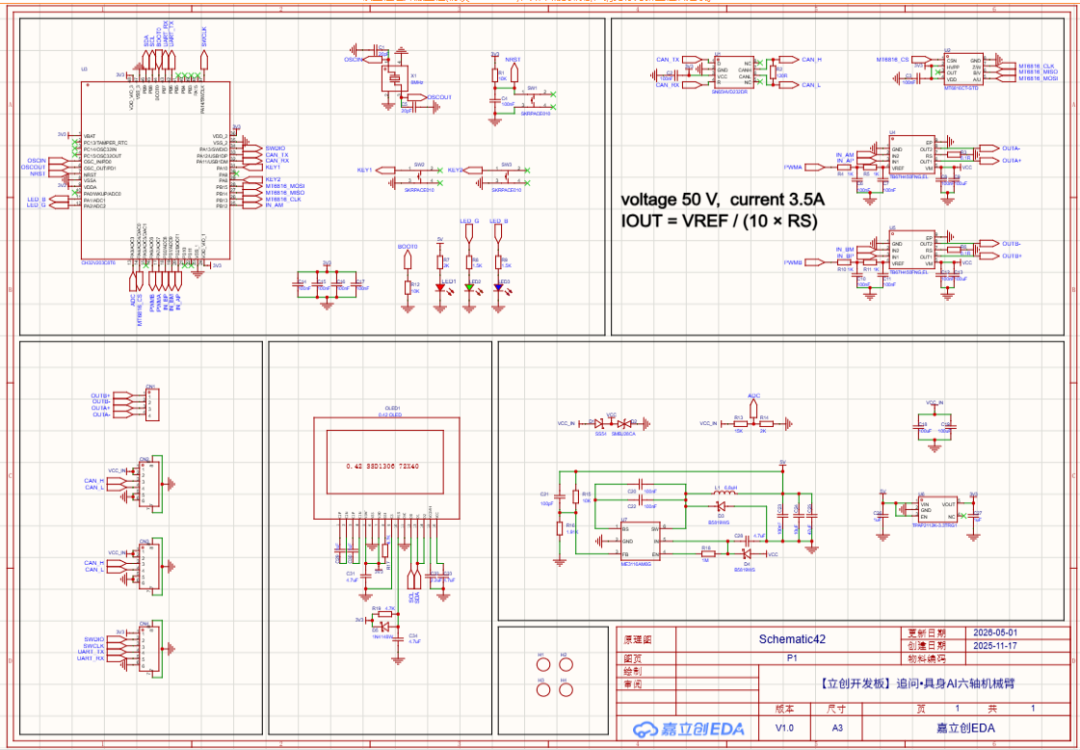
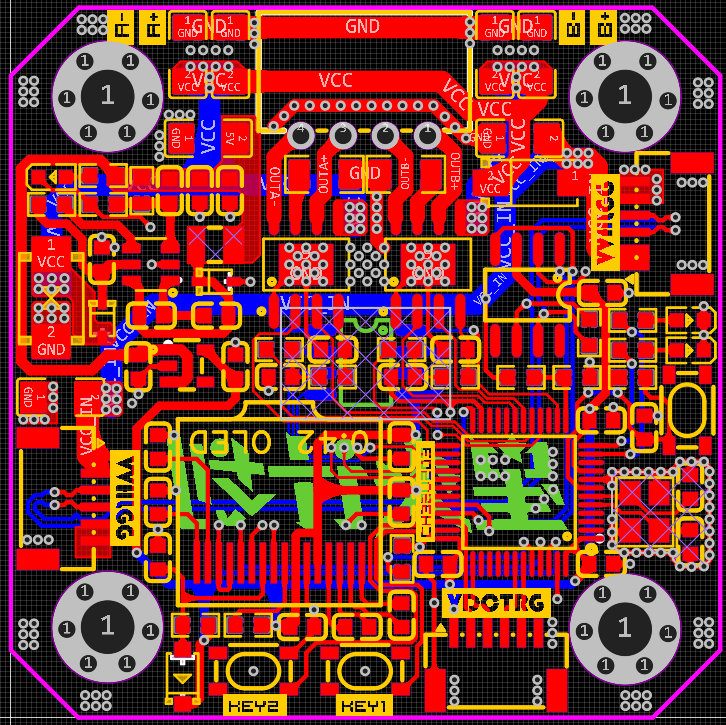
2.6 57闭环步进驱动
2.7 步进转接
03
显示终端(2块)
3.1 爱山派
基于实战派ESP32-S3的扩展板,搭载2.0寸触摸屏。运行AI Chat(语音对话)和AI Vision(视觉识别)
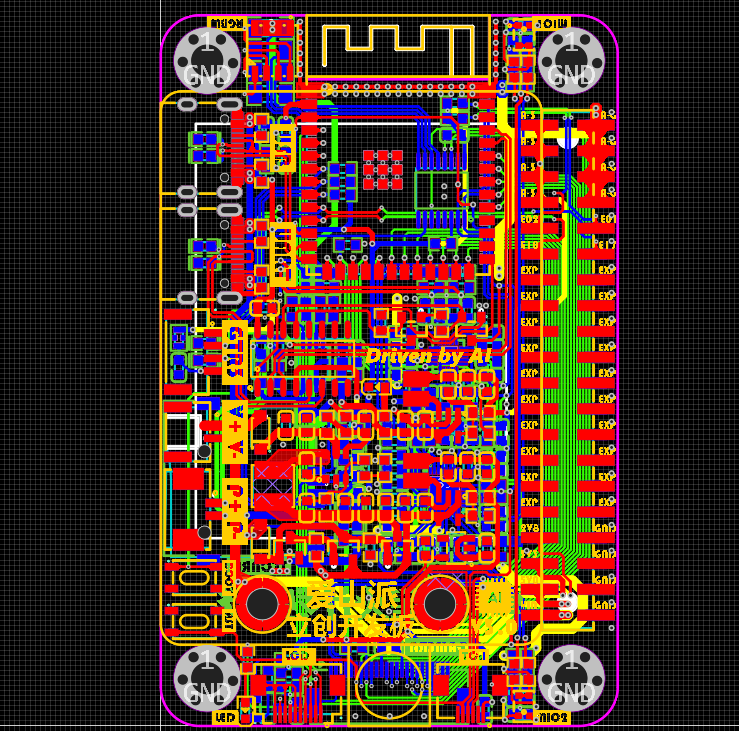
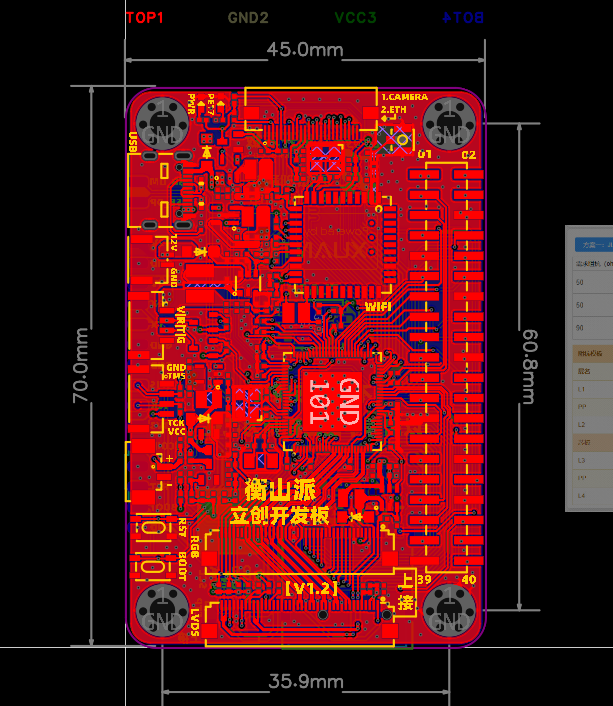
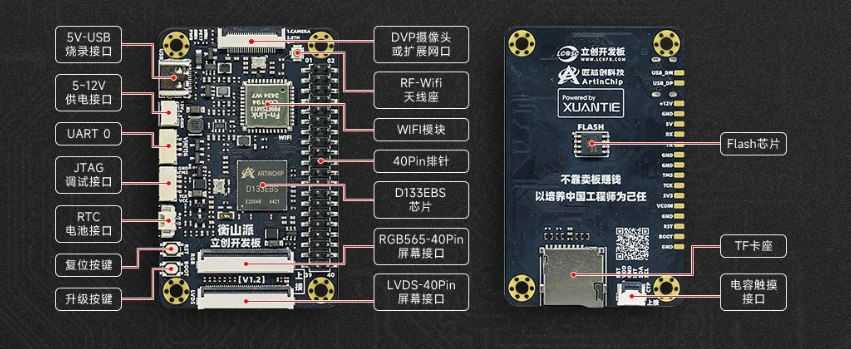
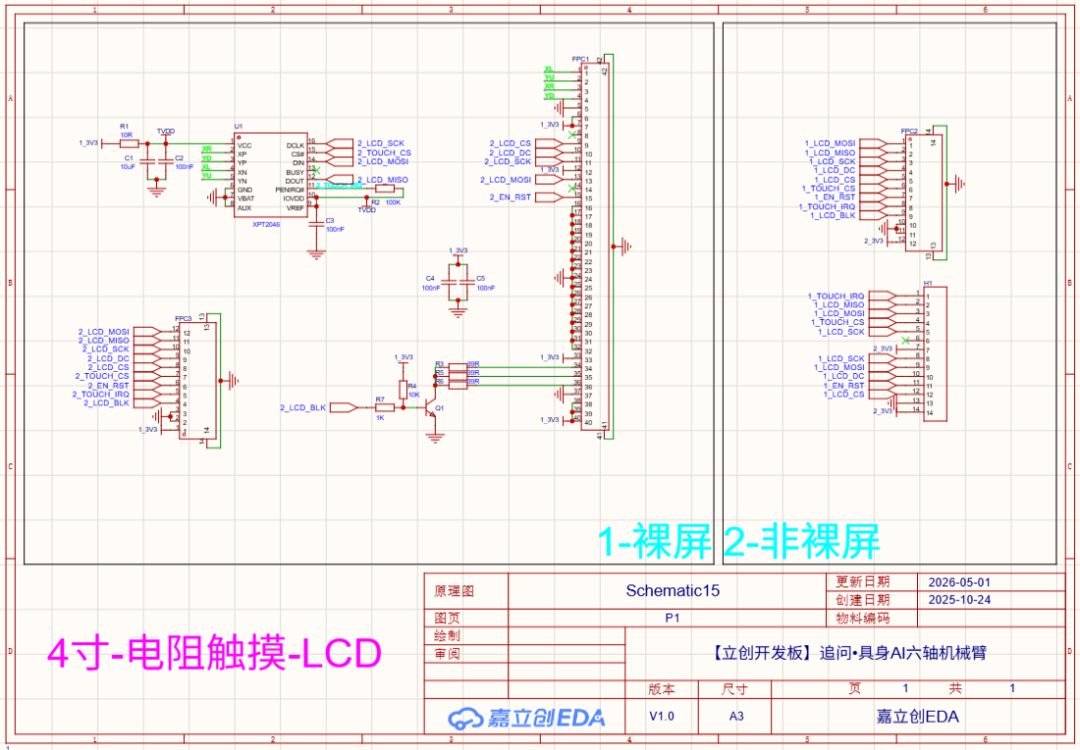
3.2 衡山派(官方)
4.3寸触摸屏扩展板,提供比爱山派更大的显示界面。作为上位机显示和操控界面,适合更复杂的控制和信息展示。
04
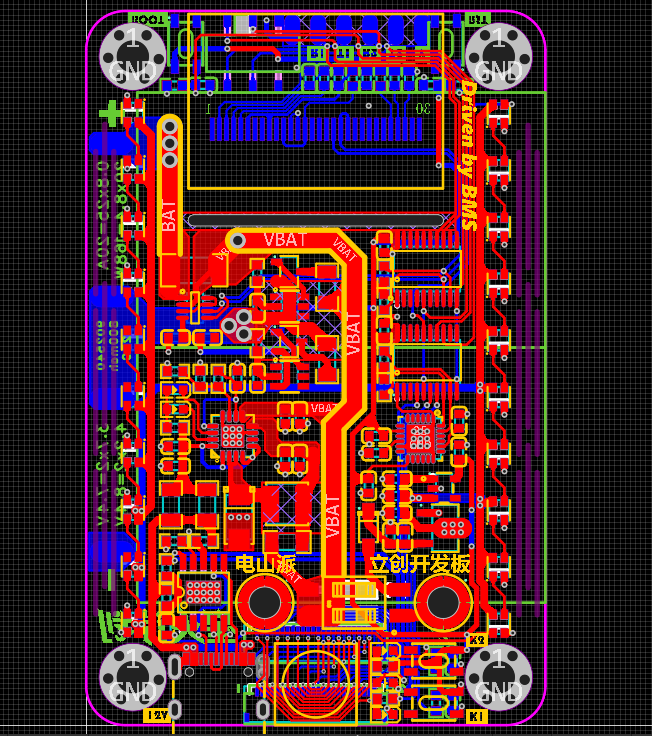
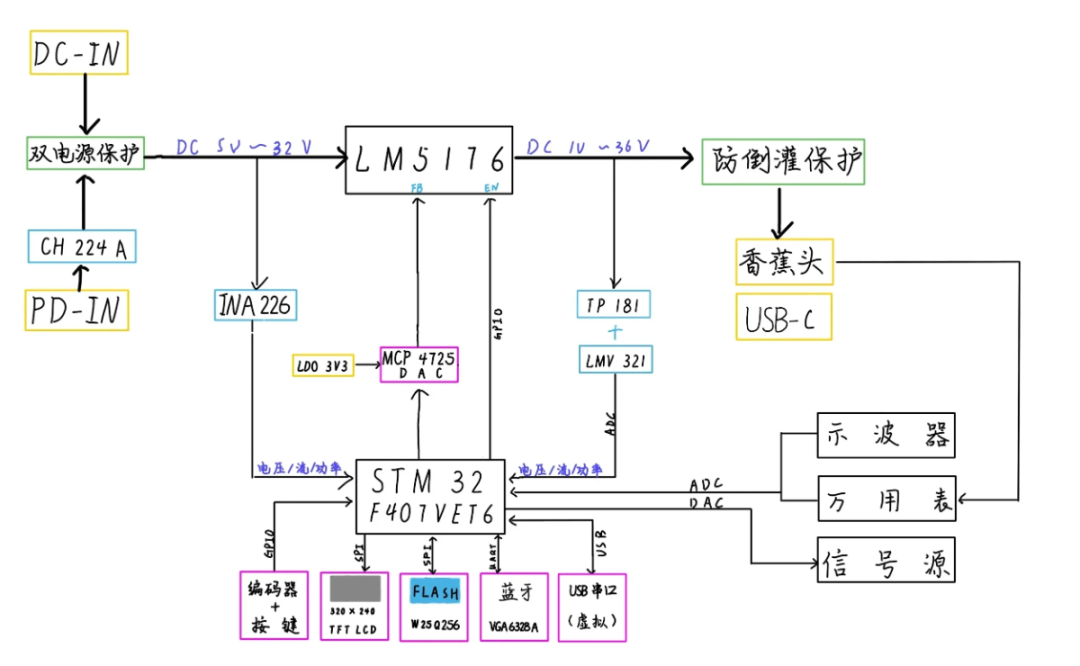
供电(1块)
4.1 电山派
负责整套系统的电源分配和管理。机械臂有十几块板子同时工作,供电方案很关键
05
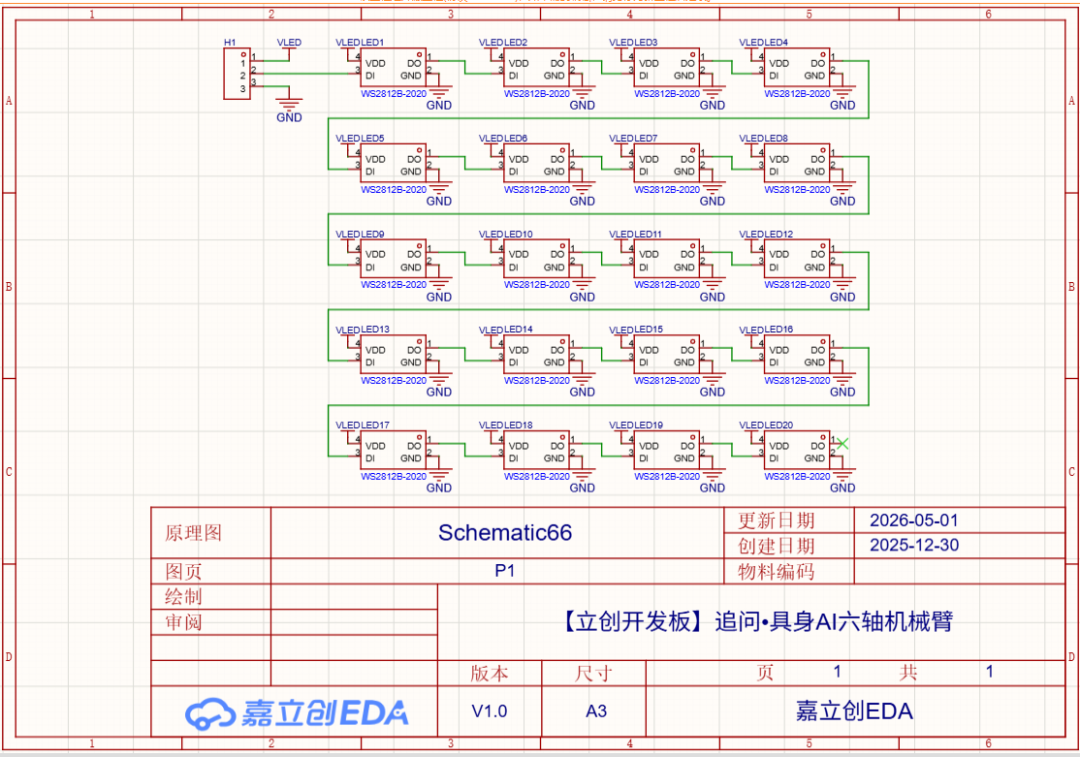
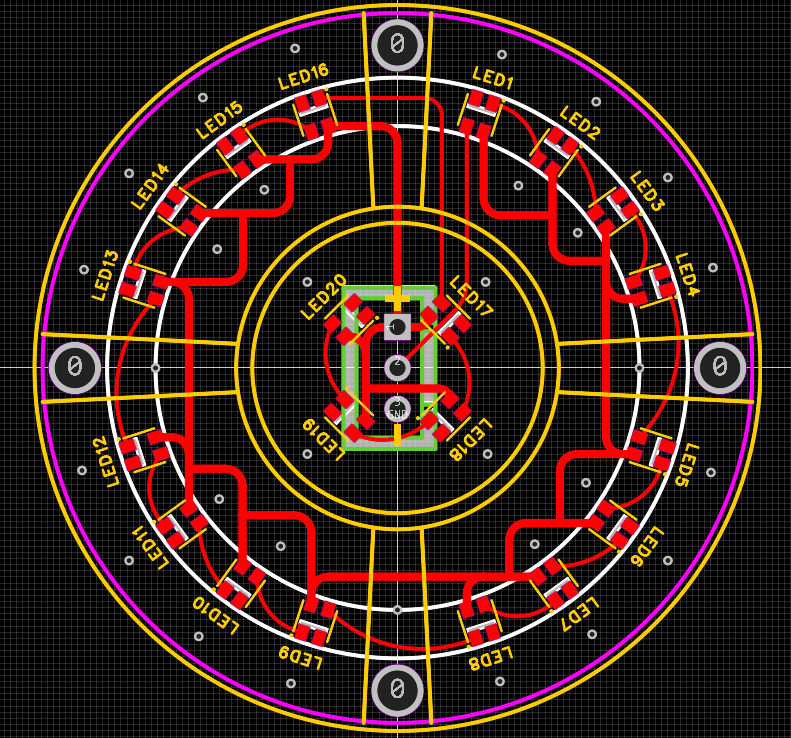
辅助/接口(4块)
5.1 RGB灯环
5.2 爱山派:屏幕FPC
5.3 激山派:屏幕FPC
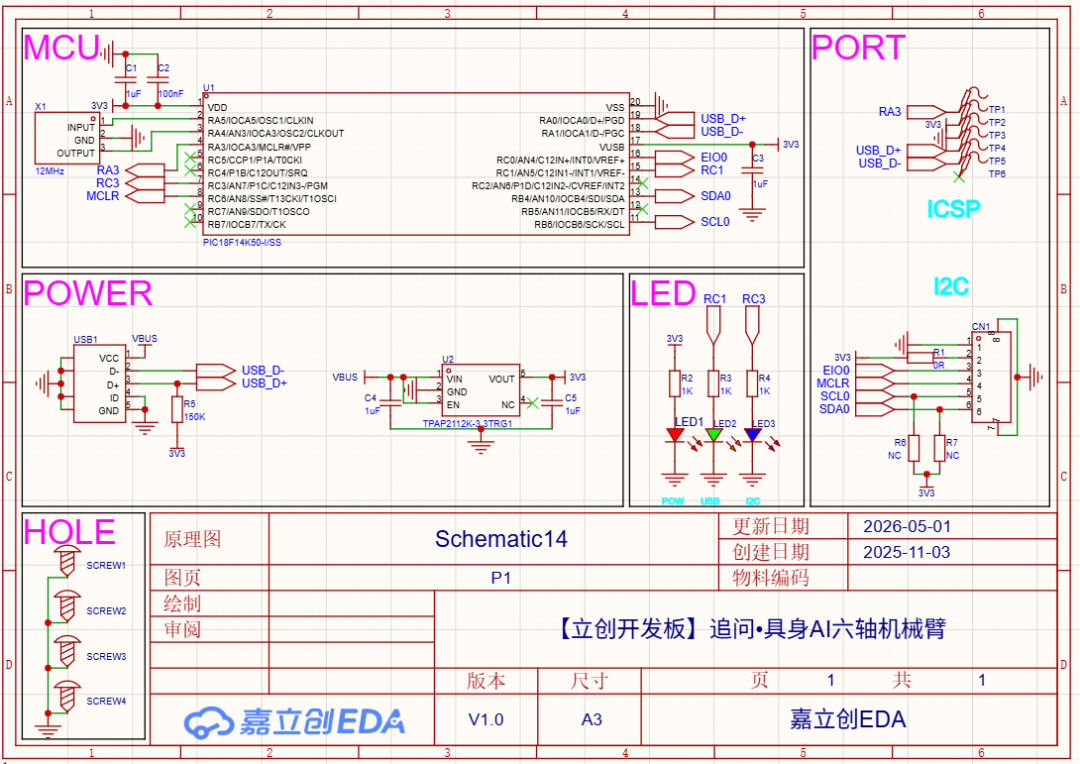
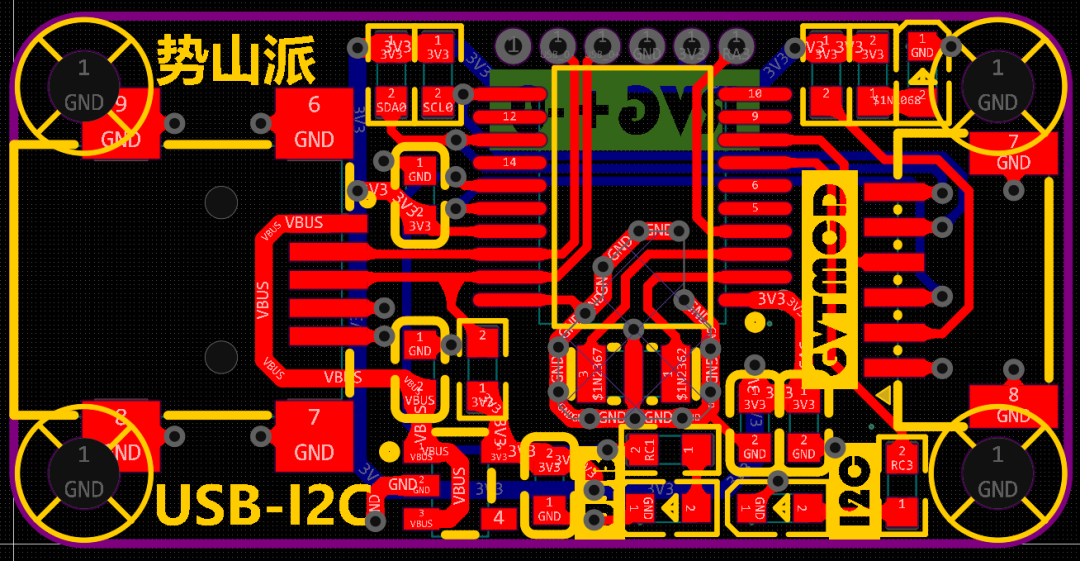
5.4 势山派:USB转I2C
06
待开发(2块)
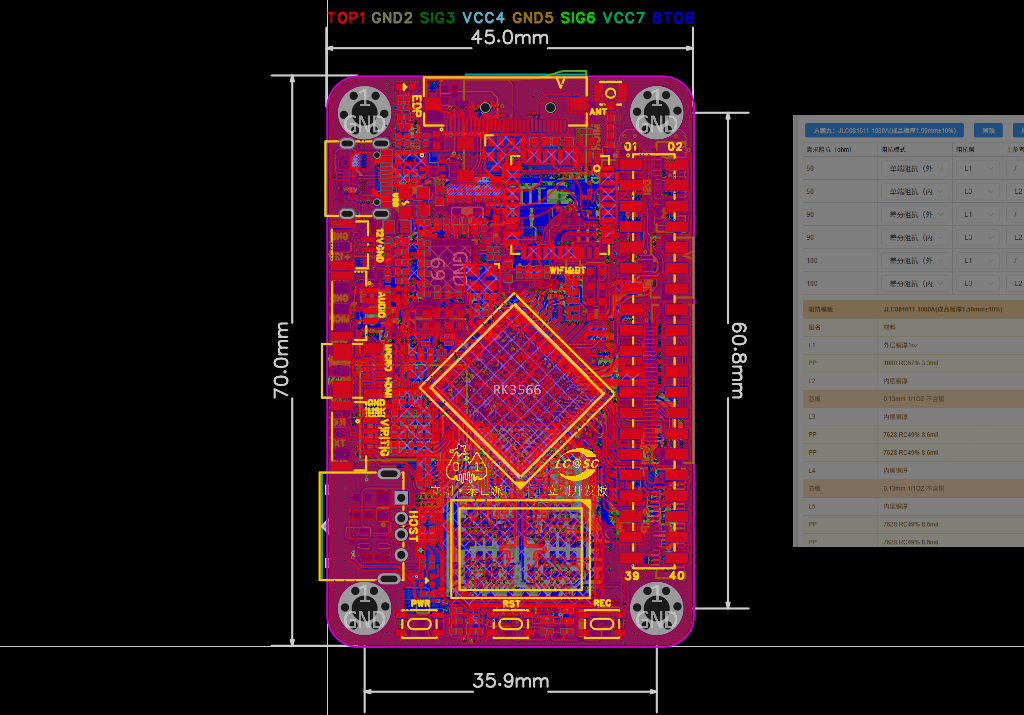
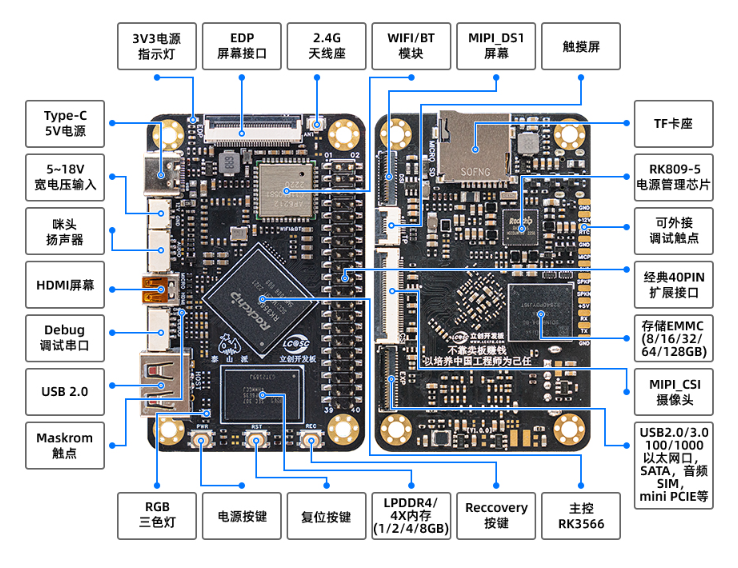
6.1 泰山派(官方)
ROS,本地AI处理,待开发
6.2 黄山派(官方)
手指捏合,UWB识别,待开发
07
总结

当用户挥手控制机械臂,势山派毫米波雷达检测到3D手势动作,手势数据通过I2C传给核山派,核山派解析手势意图,计算目标关节角度,通过CAN总线下发位置指令到对应的步进驱动器,驱动器执行FOC闭环控制,电机转动到目标角度,同时爱山派屏幕显示当前状态,乐山派播放提示音……
*0***3
软件设计方案
”
这一章讲清楚四个核心问题:
1. CAN总线怎么通信?
2. FOC算法跑在哪里?
3. AI功能怎么落地?
4. 手机APP能控制什么?
01
CAN总线通信
核山派作为CAN总线主控节点,通过CAN FD与6路步进驱动器(1个35驱动+2个42驱动+3个57驱动)进行串级通信。
总线采用菊花链拓扑,各驱动器依次串联,核山派通过ID寻址向指定节点下发运动指令,同时接收驱动器的状态反馈(位置、速度、电流)。
核山派与其他立创开发板之间的通信也通过CAN总线完成,形成统一的数据交换网络。
02
步进驱动算法
三块闭环步进驱动板(35/42/57)均搭载独立MCU,本地运行FOC(磁场定向控制)算法,配合横波斩流方案实现力矩、速度、位置三环闭环控制。
三环PID参数可通过CAN总线由核山派远程配置调节:
驱动器接收核山派下发的目标位置/速度指令,在本地完成电流环、速度环、位置环的实时计算,输出PWM驱动步进电机。
03
AI功能实现
爱山派基于ESP32-S3平台,软件层面运行AI Chat(语音对话)和AI Vision(视觉识别)两大功能模块。
-
AI Chat通过Wi-Fi接入云端大语言模型API,实现语音转文字、意图理解、对话回复的全链路交互;
-
AI Vision通过MCP(Model Context Protocol)协议调用云端视觉模型,完成图像识别与分析。
庐山派K230搭载CanMV固件,负责摄像头图像采集与预处理,将视觉数据传给爱山派或核山派进行后续AI推理。
04
鸿蒙蓝牙APP
核山派集成蓝牙模块,支持鸿蒙6.0蓝牙协议,可与手机端APP配对连接。
APP作为上位机,实现远程查看机械臂状态、手动控制关节角度、参数配置等功能,是本地屏幕交互之外的第二操控入口。
*0***4
开源网址
”
目前,项目已全开源!开源内容如下:
——想复刻****?想给作者**点赞*?下面会附上开源网址↓,欢迎大家在遵循作者开源协议的情况下,友好复刻学习~~*
开源网址:https://oshwhub.com/gshaoburuchuan/project\_oajuxfqg
领券活动









评论区
登录后即可参与讨论
立即登录