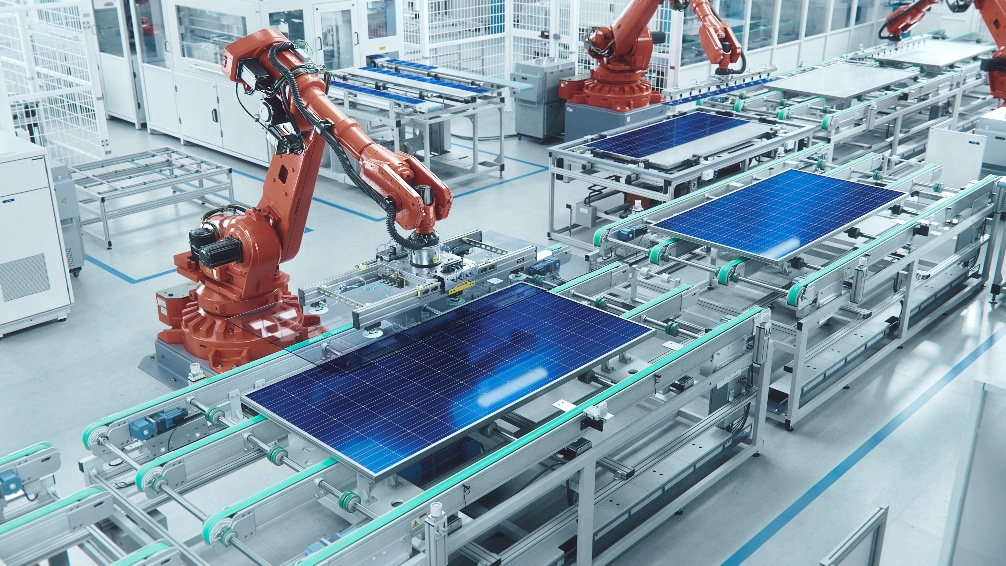
从生产流水线到物流运输,物理AI(Physical AI)在工厂中展现出了巨大的应用潜力。在上一期节目中,我们为大家介绍了英特尔晶圆厂里的“超级巡检员”——机器狗Chip。
不过,工厂环境复杂多变,意外情况时有发生。如何在现实条件的重重限制下,确保物理AI安全、稳定、高效地交付成果? 这难度就像让一个习惯了“机械舞”的机器人去跳随机应变的“即兴街舞”。今天,我们就来看看英特尔是如何做的。
如何让机械臂跳出“整齐划一”的机械舞?
在流水线上,精度至关重要。
流水线上的机械臂负责执行各种任务,如拾取、放置、检测、包装等等,每个动作都必须与同一流水线其它机械臂保持同步。如果一个机械臂的动作快了千分之一秒,另一个慢了千分之一秒,最终的产品就会出问题。
因此,驱动机械臂的计算系统不仅需要速度,也需要保持一致性。例如英特尔® 酷睿™ 处理器(系列2)所采用的英特尔® 时序协调计算(Intel® TCC)和时间敏感网络(TSN)技术,便能够在降低延迟的同时,实现精准的时序同步,让流水线上机械臂的运行更稳定、更可预测。
此外,该处理器的全性能核架构还简化了CPU管理和调度,降低了开发复杂度及维护成本。开发人员不用考虑“大小核”的调度差异,每个核心在不同时间的行为都保持一致,这正是工业系统能连续稳定运行多年的基石。
如何让机器人学会“随机应变”?
机械臂等固定机器人适用于控制主导型的工作负载,与此同时,行业还在探索自主移动机器人(AMR)的应用,这类机器人不仅能够按顺序执行操作,还能自主进行观察和推理。开发自主移动机器人需要应用计算机视觉模型。

此前,用于工业机器人的计算机视觉模型规模较小,通常参数量低于5000万。在处理一些特定的任务时,这些模型还算有效,如零件还在不在、焊缝是否对齐、工人是否佩戴安全帽等。然而,一旦外部条件发生变化,即使是安全帽从黄色换成蓝色,这些模型也会失效。
视觉语言模型(VLM)和视觉语言动作模型(VLA)的出现有助于应对这一挑战,这些模型基于Transformer架构,参数量从5亿到50亿不等,甚至更大。配备视觉语言模型的机器人,在安全帽的颜色和形状发生变化的情况下,仍能识别出它是安全帽。视觉语言动作模型则更进一步,它具备模仿学习的能力,它可以观察人类执行任务的过程,随后自主完成同样的任务。
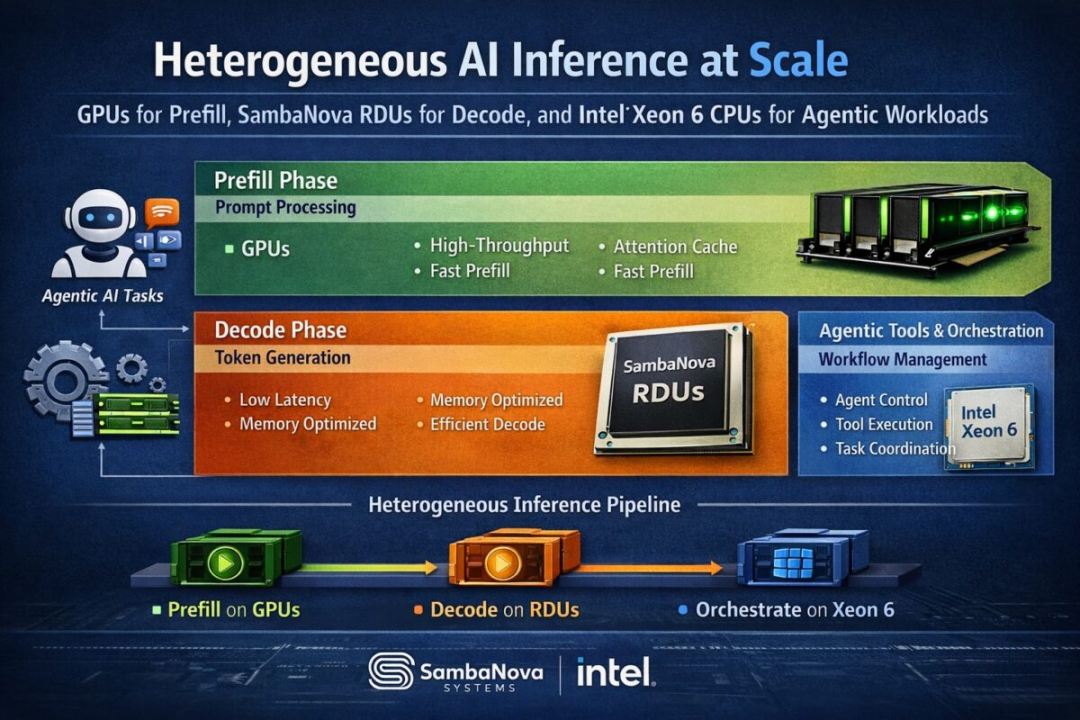
打造异构机器人系统
自主移动机器人在负责物流运输等任务时,同样需要保障其可靠性。计算机视觉模型和实时控制不能占用相同的计算资源,否则机器人哪个方面也做不好。因此,机器人系统要能够同时且独立地支持不同的功能。
说到这里你可能会想,多用几片处理器不就行了吗?传统上确实是这样,一个专用处理器用于实时控制,另一个处理器用于AI推理。然而,双处理器意味着两块电路板、两套软件栈、独立的散热管理,以及更高的集成风险。每增加一个组件,都会增加成本和制造难度,出故障的几率也会上升。
如何才能“各司其职,互不干扰”?第三代英特尔® 酷睿™ Ultra处理器的解决方法是,由不同的功能单元CPU、GPU和NPU构成单独的芯粒,视觉处理在NPU上运行,基于大语言模型的推理在GPU上运行,实时控制在CPU上运行,它们可以并行,互不争用资源。相比双处理器方案,它不仅大幅降低了硬件复杂性,还集成了近180 TOPS的AI算力,并支持ECC内存和功能安全(FuSa),适配严苛的工业环境。

从保障微米级精度的固定机械臂,到能自主导航、甚至模仿人类动作的智能机器人,物理AI正在全方位重塑制造业。
通过部署这些“智商”与“体能”兼备的机器人,工厂不仅能加快生产流程、提高效率,还能优化设备运行时间、预测良率,实现产品质量的提升和客户体验的改善。







评论区
登录后即可参与讨论
立即登录