太酷了!小伙手搓了一把宝剑!有剑魂的那种……
工程名称:五行大宝剑_沙发下的土豆 工程作者:沙发下的土豆 前言 我做了一把宝剑**!有“剑魂”**的那种!开源了! 图中功能为激光测距 *0***1 它有啥功能? ” 支持语音/NFC控制宝剑技能(光效),通过百度ASR识别语音 语音技能:当玩家按住按钮说出“剑诀”,剑身会自动播放对应技能(光效),目前有6个剑诀:天地玄黄;宇宙洪荒;日月盈昃,辰宿列张,寒来暑往,秋收冬藏。 NFC
纳米网嵌入式开发频道 — 提供嵌入式开发领域最新资讯、技术文章和行业动态。

工程名称:五行大宝剑_沙发下的土豆 工程作者:沙发下的土豆 前言 我做了一把宝剑**!有“剑魂”**的那种!开源了! 图中功能为激光测距 *0***1 它有啥功能? ” 支持语音/NFC控制宝剑技能(光效),通过百度ASR识别语音 语音技能:当玩家按住按钮说出“剑诀”,剑身会自动播放对应技能(光效),目前有6个剑诀:天地玄黄;宇宙洪荒;日月盈昃,辰宿列张,寒来暑往,秋收冬藏。 NFC
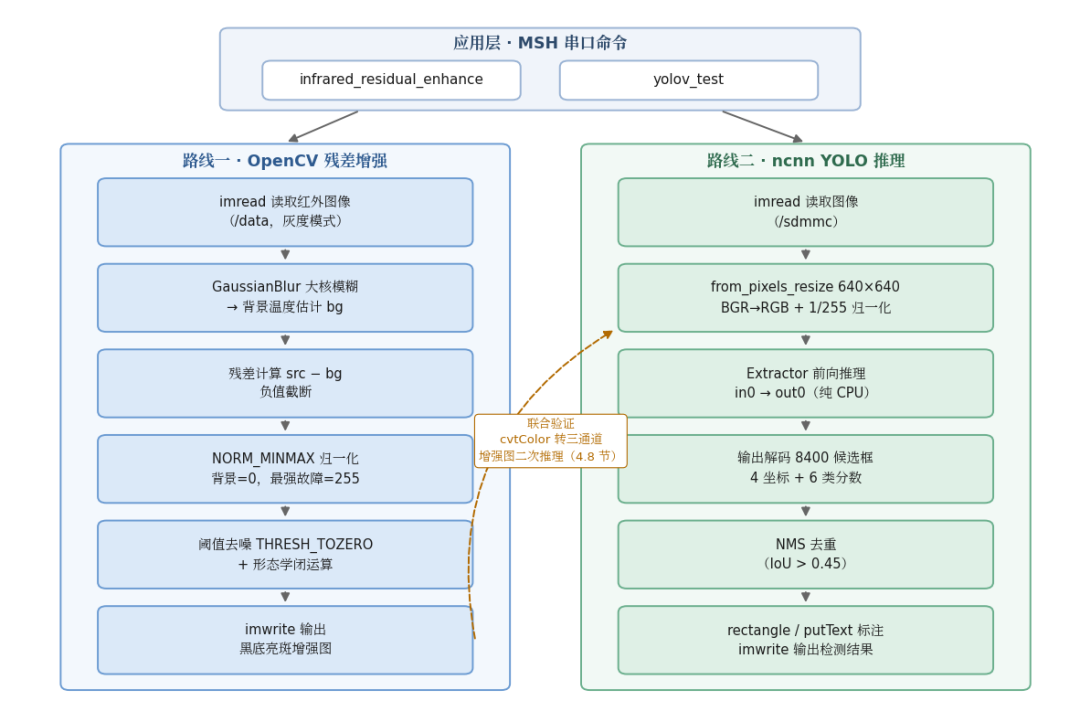
摘要: 本文介绍在睿擎(RuiChing)RK3506 平台上移植使用 OpenCV 开源软件包,并结合 ncnn 推理框架部署 YOLO 模型,实现光伏组件红外图像故障检测的完整方案。文中以实际工程代码为主线,依次讲解红外图像残差增强算法与 YOLO 缺陷检测推理的实现过程。 一、OpenCV 与 ncnn 框架概述 OpenCV,全称 Open Source Computer Vision L
今天,我们正式为 nRF Connect SDK 和 nRF Cloud上线 AI 辅助开发功能。对众多开发者而言,AI 辅助工具早已融入日常开发流程。Claude Code、Cursor 以及 GitHub Copilot 能够协助编写代码、解读应用程序接口(API)、加快常规任务处理速度。但基于通用数据集训练的大语言模型(LLM)存在明显局限性:这类模型缺少 Nordic 相关专属场景信息与实

前言 这是一个烘干器****! 这样使用▼ 作者做了一个亚克力箱子,把整个amslite和干燥器(本项目)放进去,保持整个箱体,维持在50度左右。 *0***1 这个烘干器能干啥? ” 支持同时烘干4卷3D耗材 支持通过网页+手机控制烘干机:可以连接wifi后在网页控制台操作或配置MQTT连接homeassistant,设备外壳上设置了三个按钮用来应急控制 调温范围:20℃-12
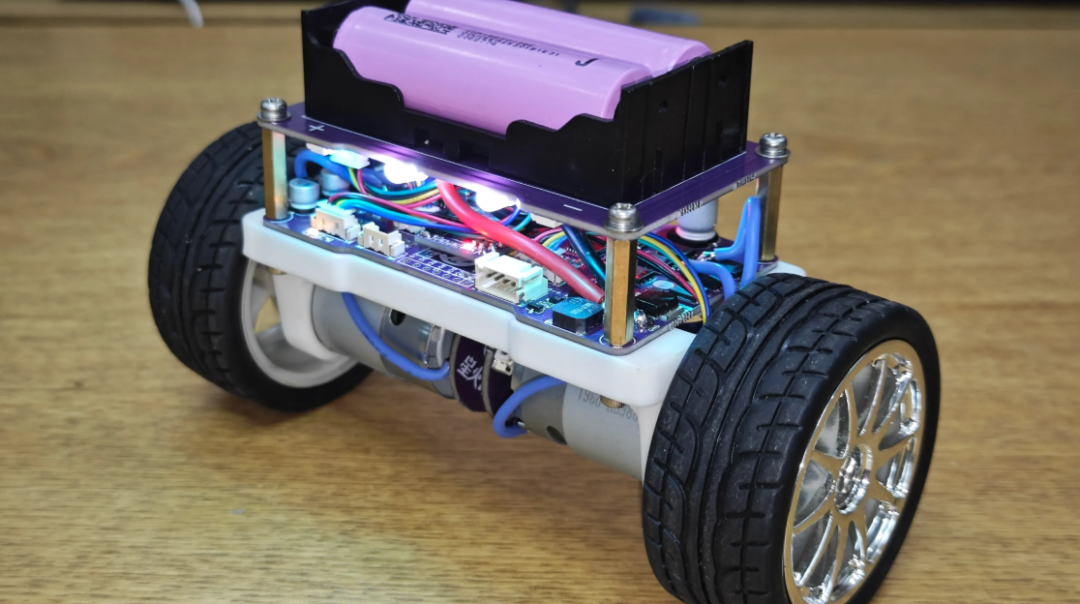
前言 我花165元,做了个智能两轮平衡车! 我彻底压榨了STM32F401的性能,实现了: 用165的超低成本 做出**产品级**平衡车底盘才有的 稳定感**与安全感** 下面就介绍一下它的功能+设计方案+调试说明 *0***1 功能&亮点 01 核心控制功能 自平衡站立:基于MPU6052C六轴姿态传感器与串级PID控制算法实现,静态晃动小,抗干扰能力强,轻碰撞不倾倒 运动控

前言 这是一个**USB小工具**! 你猜猜 它能干啥? 答案揭秘! 当你将它接入台式机,就能实现: 自动解锁/打开电脑 自动检测CPU状态 …… 当你将它拔掉,它会: 自动休眠/关闭电脑 …… 没错!这是一个电脑“钥匙”! 但!**它的一些功能让它比钥匙更好玩**,实用性更高…… *0***1 项目功能&亮点 ” 这个USB“钥匙”,有5大功能! 电脑钥匙:插入自动输入密码解锁

基于 Web Serial API 的纯前端串口调试工具,单文件 HTML,零安装、零依赖。 支持虚拟终端 ANSI 转义序列解析、参数引导弹窗、连接状态指示、收发统计、日志一键保存。 配套资源:技术报告 Word 版、源码 serial_terminal.html 一、项目背景 睿擎 RC3506 平台调试过程中,传统串口助手(XCOM / Putty / SecureCRT)需要安装客户端,
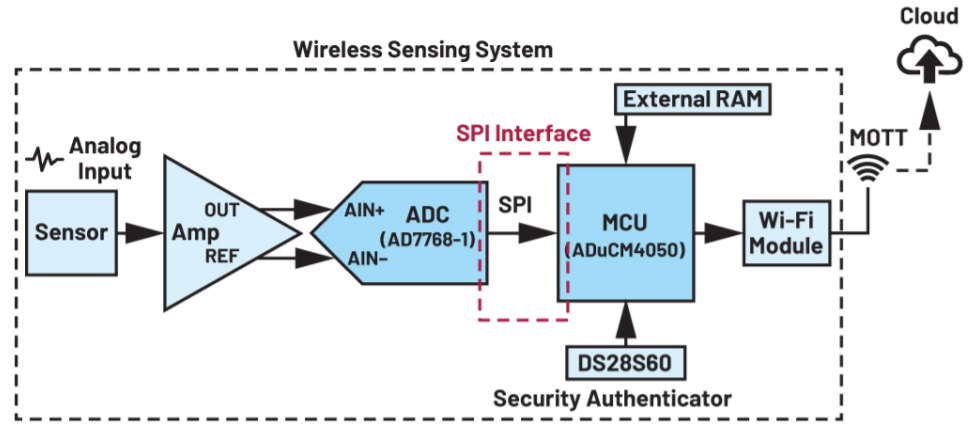
随着技术的进步,低功耗物联网(IoT)和边缘/云计算需要更精确的数据传输。图1展示的无线监测系统是一个带有24位模数转换器(ADC)的高精度数据采集系统。在此我们通常会遇到这样一个问题,即微控制单元(MCU)能否为数据转换器提供高速的串行接口。 本文描述了设计MCU和ADC之间的高速串行外设接口(SPI)关于数据事务处理驱动程序的流程,并简要介绍了优化SPI驱动程序的不同方法及其ADC与MCU配置
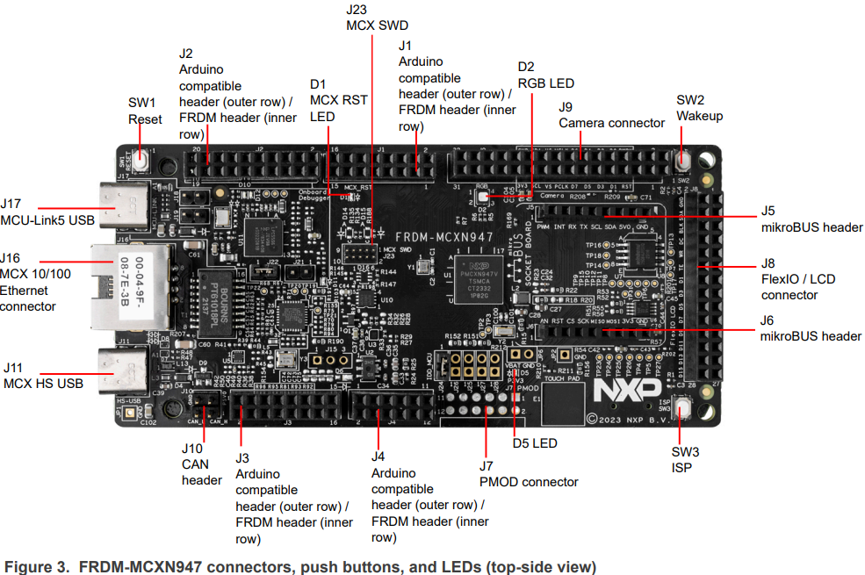
概述 随着机器人技术与嵌入式系统的不断融合,如何让资源受限的微控制器也能接入强大的ROS2生态,成为开发者关注的重点。Micro-ROS正是在这样的背景下诞生,它将ROS2的通信能力和架构优势“下沉”到MCU级设备,让嵌入式系统也具备分布式、可扩展的能力。 NXP推出的MCXN947作为一款性能强劲、资源丰富的Cortex-M33微控制器,加上官方FRDM-MCXN947开发板,为开发者提供了理想
本文分享基于 Titan Mini Board实现KWS语音关键字识别测试,分享应用Demo。代码详见附件完整工程, 导入Titan_Mini_wavplayer到打开工程即可。 download.eeworld.com.cn/detail/qinyunti/639204 目录 过程 测试 总结 获取同款硬件 1 过程 参考https://github.com/ARM-software/ML-K

如果您正在开发智能电表,那么您可能早已听过这个颠覆整个市场的问题: Q “你们的电表是否能够识别正在运行的电器、检测篡改行为并且不依靠云端即可独立运行?” 事实上,准确计量能耗已不足以满足当今需求。如今,公用事业公司和能源供应商希望智能电表能够在现有的硬件平台和紧张的部署时间等限制条件下,提供切实可行的洞察信息,保证数据完整性,并提升用户参与度。随着市场对数据洞察的需求日益迫切,采购周期不断缩短
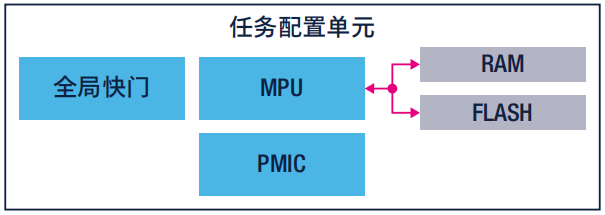
行业无人机正加速向自主化、高清化、远距离可靠作业与多传感感知升级,测绘、安防巡检、农林植保等场景对整机性能提出更高要求。本期意法半导体将深度拆解任务配置单元、云台摄像子系统、遥控无线连接以及无人机激光雷达/雷达四大核心模块完整方案,以全系列自研器件赋能工业无人机,实现自主作业、超清稳像、稳定远距离操控与高可靠感知能力落地。 配置单元:无人机自主作业“智慧大脑” 作为人机交互与自主飞行核心中枢,该单

电源、防护是无人机稳定飞行、杜绝炸机、长效续航的底层核心;一站式开发套件则是快速搭建原型、压缩研发周期、降低试错风险的关键利器。今天带大家全面拆解意法半导体四大核心支撑体系——电源管理、接口防护、射频匹配、标准化开发套件,为无人机规模化量产提供完整闭环解决方案。 电源管理IC:高效供电,拉长整机续航 电源芯片直接决定无人机发热控制与续航表现,ST丰富电源产品线覆盖总线供电、MCU/传感器低压供电、

工程名称:claude-knock闹钟/码克助手 前言 这是一个码克助手****! 它能干啥呢? 它能通过“眼镜”,实时显示Claude Code的执行状态!还会发出声音提醒你! 彻底解放精力,好摸鱼做更重要的事! 它的“绿皮肤”↓也很好看 它具体能提示些啥? 做开发的时候,你有没有这样的经历? ——Claude Code 正在跑一个长任务,你不确定它是在思考、在写代码、还是已经跑完了,于是

工程名称:BLE+UART迷你串口调试器 前言 这是一个非常简单/好复刻的迷你**串口调试器**! DIY成本仅28元!(不包含外壳成本) 但!低成本却并非它最大的亮点!它的最大亮点是: ——在28元的成本下,作者没有随便设计外接串口保护,反耳呢,SMF5.0CA TVS + 双LM66100 + LDO一套连招下来,防高压反灌和可控供电的设计比很多只做BLE透传的模块保护设计更周全 接下来,
从娱乐飞行到专业巡检,从国防安防到集群协同——无人机的边界正在被边缘AI重新定义。模式识别、视觉导航、预测性维护……这些能力背后,都离不开强大、高效、可控的半导体技术支撑。 意法半导体为无人机开发提供全面的解决方案,不仅包括实现关键飞行稳定、高度控制、避障与自主导航的微控制器及传感器,更在电机驱动、信号放大、电源管理、通信互联、开发套件等方面形成完整配套。 为助力开发者吃透无人机系统架构,借助成熟
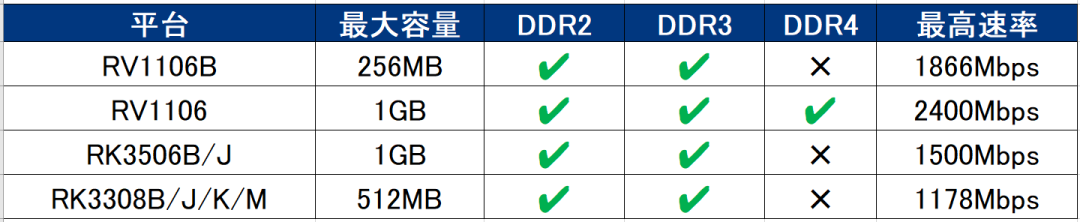
全球存储市场结构性调整持续演进,DDR颗粒短缺的局面依然严峻。此前,瑞芯微已发布多期公众号文章介绍了RK3588、RK3576、RK3566、RV1126B等多款SoC平台的DDR支持能力,释放多套差异化设计模板、适配参考及验证指南。 入门级AIoT市场对成本极度敏感、同时对场景适配的灵活性要求极高。因此弹性的内存配置方案尤为关键。在此背景下,瑞芯微紧扣客户在成本、性能与供应链韧性的差异化诉求,延
Q1 为什么推荐在独立Arm设备上跑龙虾,而不是直接跑在PC/笔记本或云主机? A PC/笔记本存在工作生活数据干扰、Windows环境复杂需保持不休眠、长期运行功耗100W+电费高、设备数千元占用主力生产力等问题,云主机/VPS则有数据上云的隐私泄漏风险、违背“本地AI”原则、网络延迟与IP风控、持续订阅成本高等弊端。独立Arm设备插电即用、7×24静默运行、设备500元起、整机功耗仅约5W、所
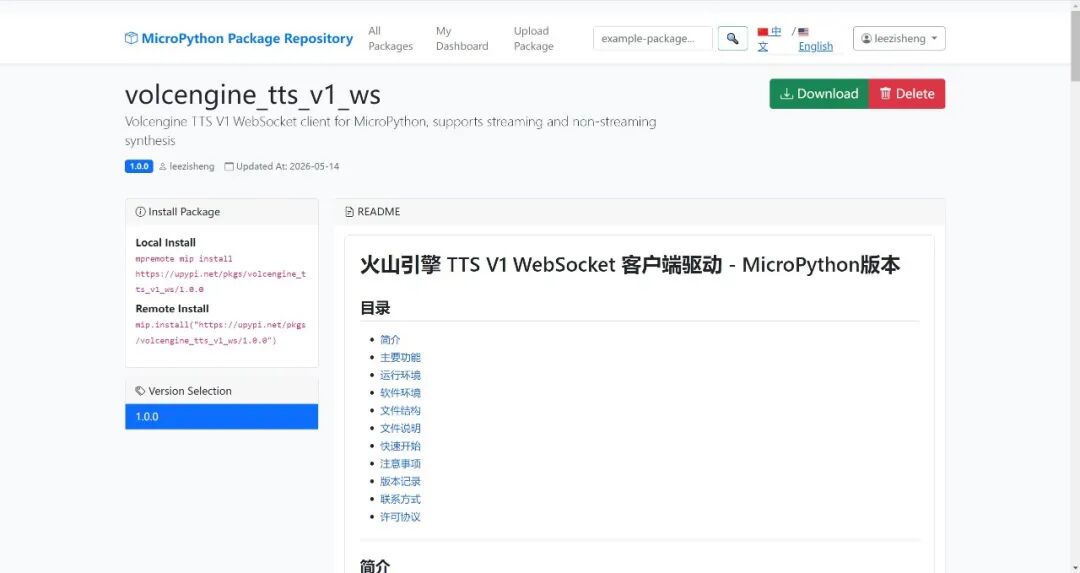
做嵌入式智能设备、离线语音音箱、单片机交互项目的朋友,大概率都绕不开语音合成 TTS。之前做一个 AI 语音对话机器人时候,使用的是讯飞云 TTS 模型,感觉非常慢,于是换到了火山引擎豆包语音模型上,快了不少,今天突发奇想没对比一下两个模型,拿 ESP32+MicroPython 搭建了完全一致的 WiFi 网络环境,整理40 条真实业务语料,覆盖日常聊天、新闻播报、客服话术、技术专业语句,一次性

在嵌入式开发中,存储空间和网络带宽一直是稀缺资源:数据库文件太大存不下、传感器数据量大传不动、固件升级包占用过多 Flash......传统方案要么忍着不上压缩,要么引入复杂的自研压缩逻辑,踩坑多、维护难。 今天分享一个基于睿擎派 RC3506 的完整 zlib 方案——从源码移植到应用实战,提供两种压缩方式,手把手带你搞定嵌入式数据压缩。 为什么选 zlib? zlib 是全世界部署最广泛的压缩









