闭环控制系统特征方程的根位于虚轴上,意味着系统处于临界稳定状态——系统输出会呈现持续的、等幅的振荡(无衰减也无增幅),既不收敛也不发散。
从工程意义上看,这种状态属于不稳定与稳定的边界:
-
若根在虚轴上且为单根(如纯虚数根±jω),系统输出为正弦等幅振荡,无外界扰动时会一直维持该振荡状态。
-
若根在虚轴上且为重根(如二重纯虚数根),如二阶平方型的根,系统输出会随时间逐渐增幅,实际中会表现为不稳定。
对于重根,这里重点解释一下,方程中某个根对应多次相同的一次因式,即该根重复出现2次及以上(2次为重根,3次为三重根,以此类推)。
示例:方程 (s-jω)^2(s+2)=0 中,s=jω 是二重重根(因式 (s-jω) 出现2次),s=-2 是单根。
这种临界稳定状态在实际控制系统中通常需避免,因为微小扰动就可能使系统偏离该状态,进入发散的不稳定工况。
这里有一种特殊情况,讨论一下,若闭环控制系统特征根在实轴负半轴,意味着系统处于渐进稳定状态——系统输出会随时间逐渐衰减,最终收敛到稳态值(或零),无振荡或仅存在单调衰减。毫无疑问,这里特征根还是在左半平面的。
从工程表现来看,这种状态是控制系统追求的稳定工况之一,具体特征为:
-
输出响应为单调衰减(无振荡),例如阶跃输入下,输出会平滑地趋近于设定值,不会出现过冲。
-
无论初始扰动或输入如何变化,系统最终都能稳定在平衡状态,不存在发散风险,是实际控制工程中最理想的稳定形式之一。
所以,闭环控制系统不稳定的核心条件是:其特征方程的根(闭环极点)中,至少有一个位于[s]平面的右半平面(实部为正)。
具体可分为以下两类情况:
存在实部为正的根:无论该根是实根还是复根(复根必成对出现,实部均为正),系统输出都会随时间呈指数增幅趋势,最终发散,导致系统不稳定。
存在虚轴上的重根:若特征根在虚轴(实部为0)且为二重及以上重根,系统输出同样会随时间逐渐增幅,表现为不稳定(区别于虚轴单根的临界稳定)。
简言之,只要特征根不完全位于左半平面(实部≤0,且虚轴上仅有单根),系统即不稳定。
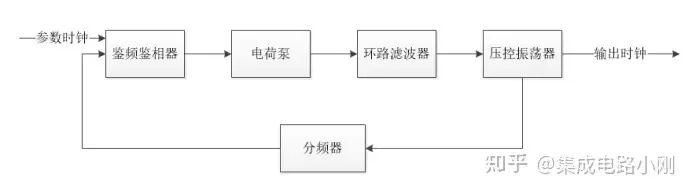
由前述文章可知,我们推导出的系统闭环传递函数的分母为 1 + G(s)H(s),令其等于0时,即 G(s)H(s) = -1,此时求解出的 s 值就是闭环系统的特征根(也称为闭环极点),其位置需通过具体的 G(s)H(s) 表达式求解得到,无法直接确定,核心取决于开环传递函数 G(s)H(s) 的形式。
具体分析如下:
根的求解依赖开环传递函数:G(s)H(s) 是系统的开环传递函数,不同系统的 G(s)H(s) 形式不同(如一阶、二阶、高阶,含惯性环节、积分环节等)。需将具体的 G(s)H(s) 代入 G(s)H(s) = -1,转化为关于 s 的代数方程(特征方程),再求解该方程的根。
根的位置(实轴、虚轴、左半平面、右半平面)会随 特征方程的具体形式变化。
根的位置决定系统稳定性:求解出的特征根(闭环极点)位置,直接对应之前讨论的稳定/不稳定条件——若根全在左半平面则稳定,有根在右半平面则不稳定,虚轴单根为临界稳定。
闭环系统特征根位于右半平面时不稳定,核心原因是根的正实部会导致系统输出随时间呈指数增幅趋势,最终发散,具体可通过数学本质和工程表现两方面解释:
- 数学本质:根的实部决定响应趋势
特征根 s 是复变量,可表示为 s = sigma + jomega(sigma 为实部,omega 为虚部)。系统输出响应的时域表达式中,会包含 e^{sigma t} 这一指数项,其变化趋势完全由 sigma 决定:
-
当根在右半平面时,sigma > 0,则 e^{sigma t} 随时间 t 增大而指数增长(如 sigma=1 时,e^{t} 会从1快速增至无穷大)。
-
无论根是实根(omega=0,响应为单调增幅)还是复根(omega≠0,响应为增幅振荡),只要 sigma>0,输出最终都会突破系统物理限制,导致发散。
- 工程表现:输出无法收敛到稳态
从实际控制效果看,若根在右半平面:
-
即使给系统一个微小的初始扰动(如电压波动、负载变化),输出也会不断放大(如电机转速越来越快、温度持续升高),无法回到设定的稳态值。
-
例如,若特征根为 s=2+j3(右半平面复根),系统输出会是“振幅随 e^{2t} 增长的正弦振荡”,最终因振幅过大导致系统失控(如机械结构过载、电路烧毁)。
简言之,右半平面根的正实部,是导致系统输出“增幅发散”的根本原因,因此系统必然不稳定。
类似的,我们也可以理解另一种情况,根在左半平面时系统的稳定,核心原因是根的负实部会使系统输出随时间呈指数衰减趋势,最终收敛到稳态值,可从数学本质和工程表现两方面理解:
- 数学本质:根的实部决定响应衰减
特征根 s 可表示为 s = sigma + jomega(sigma 为实部,omega 为虚部)。系统输出的时域响应中,会包含 e^{sigma t} 这一关键指数项,其变化由 sigma 直接决定:
-
当根在左半平面时,sigma < 0,则 e^{sigma t} 随时间 t 增大而指数衰减(例如 sigma=-1 时,e^{-t} 会从1逐渐趋近于0)。
-
无论根是实根(omega=0,响应为单调衰减,如温度缓慢趋近设定值)还是复根(omega≠0,响应为衰减振荡,如机械位移先小幅波动再稳定),最终 e^{sigma t} 都会趋近于0,输出收敛到稳态。
- 工程表现:输出能稳定到目标值
从实际控制效果看,若根全在左半平面:
-
无论系统受到初始扰动(如电压波动)还是输入指令变化(如设定温度调整),输出都会在短暂响应后稳定下来,不会发散或持续振荡。
-
例如,若特征根为 s=-2+j3(左半平面复根),系统输出是“振幅随 e^{-2t} 衰减的正弦振荡”,最终振幅趋近于0,稳定在设定值;若根为 s=-3(左半平面实根),输出则会单调、平滑地趋近稳态,无任何振荡。
简言之,左半平面根的负实部,是系统输出“衰减收敛”的根本原因,因此系统能保持稳定。
这里我们强调一个理解误区,那就是针对闭环传递函数的特征根,和开环传递函数的相移和幅值特性,也就是频率特性,要区分“根的要求”与“开环传递函数的要求”,核心是明确二者的本质对象、判断逻辑、适用场景完全不同,前者是“直接稳定判据”,后者是“间接稳定工具”,具体区别如下:
一、核心区别:本质与逻辑不同
对比维度 根的要求(闭环极点要求) 开环传递函数的要求(奈奎斯特判据/伯德图判据核心,本质对象针对闭环系统的特征根(闭环极点),是系统稳定的“根本原因”。 针对开环传递函数的“频率域特性”,是判断稳定的“工具手段”。
核心逻辑, 根全在左半平面 → 闭环系统稳定(直接因果:根的位置决定输出是否收敛)。 开环特性需满足“不包围 (-1,j0)这个不稳定点”(奈奎斯特判据),或“增益裕量/相位裕量为正”(伯德图)→ 间接推导闭环根全在左半平面。
稳定的直接/间接性 。直接判据:根的位置直接决定稳定,无需其他推导。 间接判据:通过开环特性“反向推断”闭环根的位置,不直接看根。
二、具体场景与适用范围不同
- 根的要求:直接、精准,但“难计算”
- 核心要求:闭环特征根(解方程 1+G(s)H(s)=0 得到的 s 值)必须全部位于[s]平面左半平面(实部<0)。
这是系统稳定的充要条件——只要根全在左半,无论开环特性如何,系统一定稳定;只要有一个根在右半,系统一定不稳定。
- 局限:仅适用于低阶系统(如一阶、二阶),高阶系统(三阶及以上)解方程求根非常复杂,无法直接计算,因此需要开环传递函数的判据辅助。
- 开环传递函数的要求:间接、实用,但“需结合规则”
“开环传递函数的模≠1且相移≠-180°”,本质是奈奎斯特判据的关键细节(避免开环特性穿过 (-1,j0) 点),其核心是:
-
适用场景:高阶系统(无法直接求根),通过开环频率特性(模和相移随频率的变化),间接判断闭环根是否全在左半平面。
-
核心规则(以最小相位系统为例): 开环传递函数在所有频率下,若同时满足“模=1时相移≠-180°”(相位裕量>0)、“相移=-180°时模≠1”(增益裕量>0),则闭环系统稳定。
本质是通过开环特性“不包围 (-1,j0) 点”,反向保证“闭环根全在左半平面”——但它不直接看根,而是用开环特性作为“桥梁”。
三、二者的关联:开环要求是“推导根的要求”的工具
开环传递函数的要求(如模和相移的限制),本质是为了间接确保“闭环根全在左半平面” ——它是“手段”,而“根在左半平面”是“目的”。 举个例子:
-
若开环传递函数在某频率下满足“模=1且相移=-180°”,说明开环特性穿过 (-1,j0) 点,此时闭环系统可能存在“虚轴上的根”(临界稳定),即违背了“根全在左半平面”的要求;
-
若开环特性包围 (-1,j0) 点,说明闭环系统存在“右半平面的根”,同样违背根的要求,系统不稳定。
总结:一句话区分
-
根的要求:“结果”——系统要稳定,必须满足的“最终条件”(根全在左半);
-
开环传递函数的要求:“方法”——为了达到“根全在左半”的结果,在高阶系统中采用的“间接判断工具”(通过模和相移限制,反向确保根的位置)。
对于这两种对于闭环稳定性的稳定性判据的说法需要明确其区别和共性。








评论区
登录后即可参与讨论
立即登录